
Tự làm DIY
Hướng dẫn ráp Ustep Robot Arm

Trong bài viết này sẽ giúp bạn xây dựng một cánh tay robot hoàn hảo của riêng bạn. Các chi tiết chính bạn cần phải chuẩn bị có trong file đính kèm, bạn chỉ việc in nó.
Nào hãy thực hiện ngay bây giờ!
Bước 1: Các bộ phận cần thiết
Bạn sẽ cần chuẩn bị một số linh kiện bên cạnh các bộ phận in 3D mà tối giới thiệu trong phần tiếp theo, bạn cần vòng bi, đai ốc và bulong at learn how to get more views for your youtube channel.

Bulong:
1 x M8 x 40 mm
1 x M8 x 70 mm
4 xM4 x 20 mm
4 xM4 x 35 mm
20 xM3 x 10 mm
3 xM3 x 16 mm
10 xM3 x 20 mm
9 xM3 x 25 mm
Đai ốc:
21 pcs. M3
8 pcs. M3
8 pcs. M4
2 pcs. M8
Vòng đệm:
2 x M8, OD: ~ 15,8 mm
2 x M4, OD: ~ 8,8 mm
Ổ lăn:
4 x 608Z
12 x 624Z
Thanh nhôm:
Thanh nhôm cần dùng là thanh rỗng có bề dày 1mm
1 x 15 x 200 mm
1 x 15 x 150 mm
2 x 6 x 170 mm
1 x 6 x 165 mm
Các bộ phận in 3D được chia sẻ trong liên kết dưới đây:
https://www.thingiverse.com/thing:1774473/zip
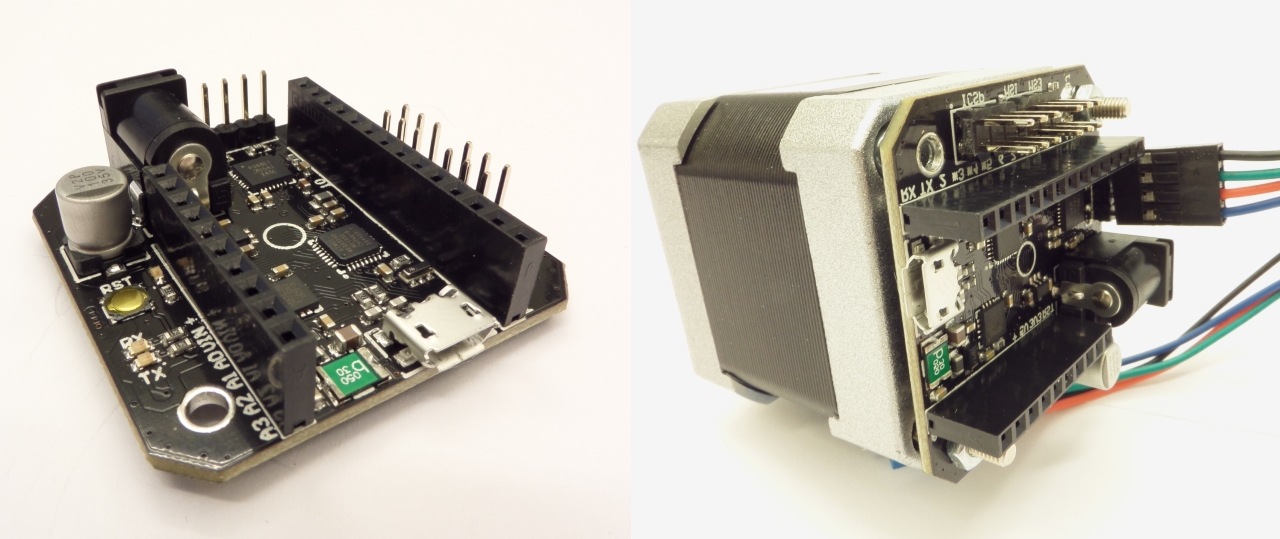
Động cơ ustep cho khả năng điều khiển chính xác hơn những step bình thường
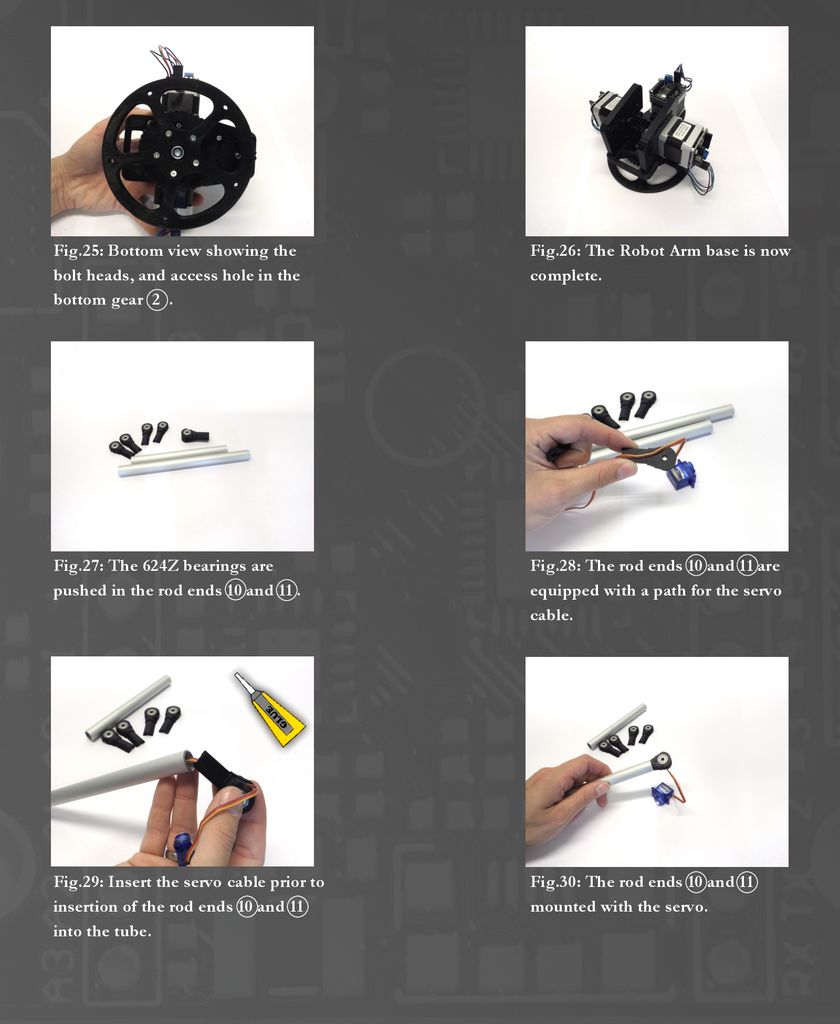
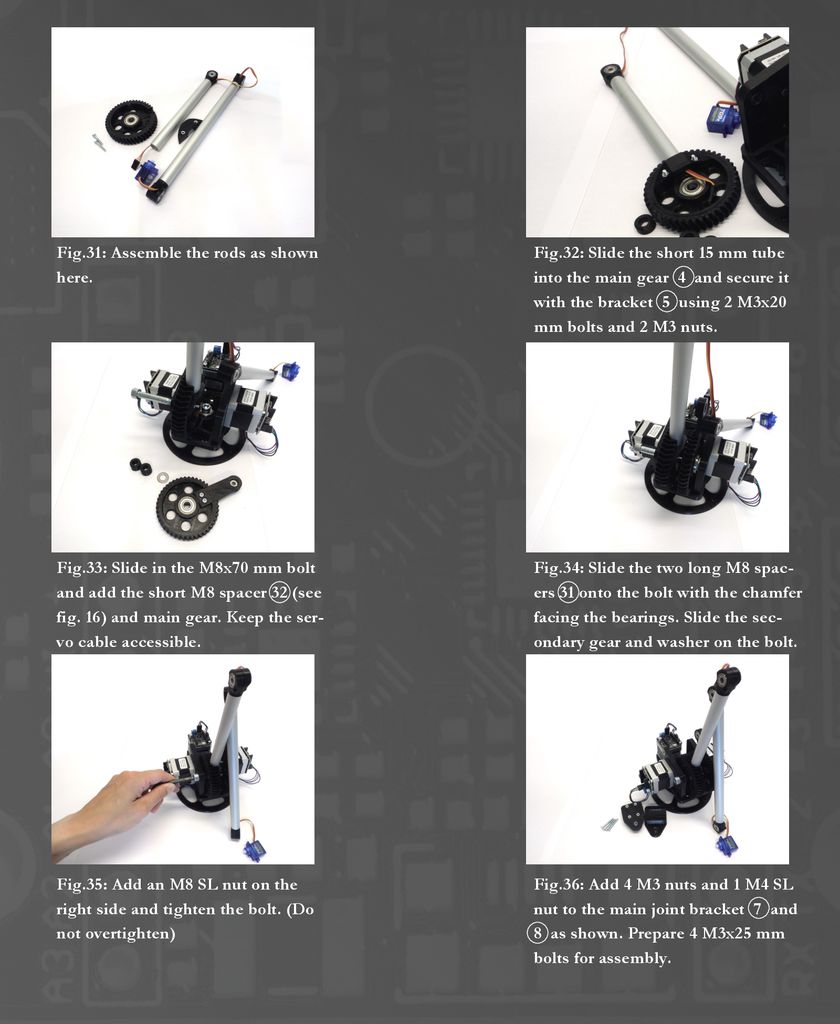
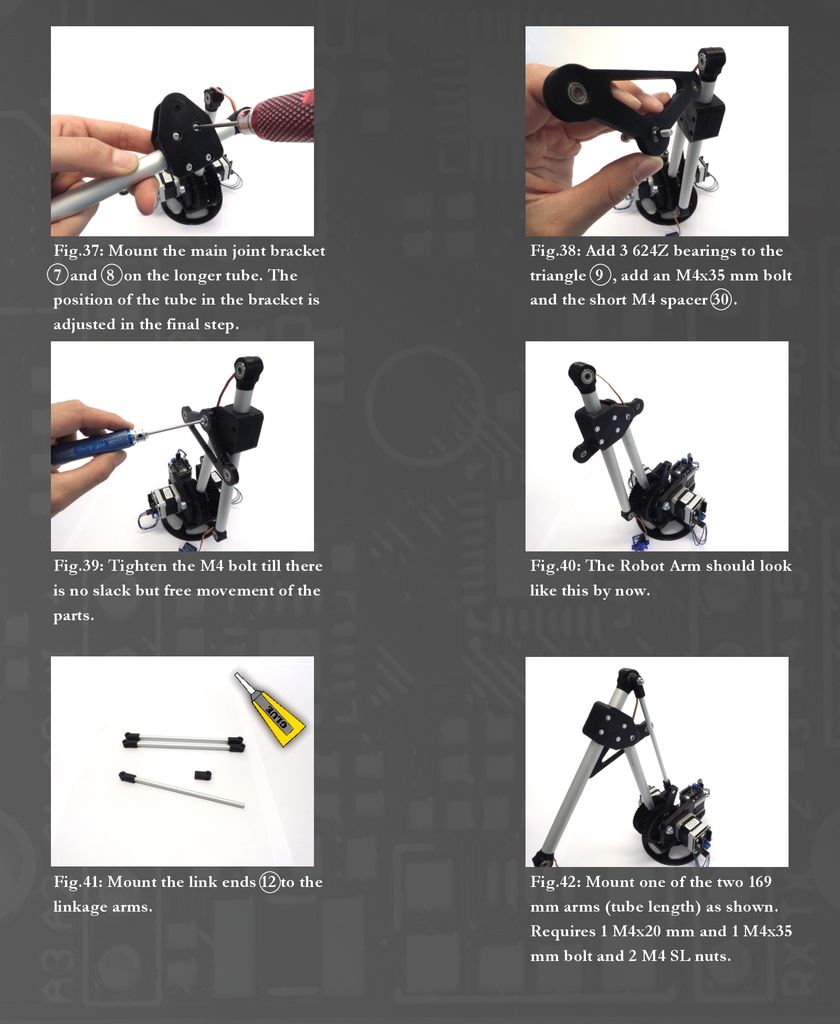
Bước 2: Lắp ráp
Bạn chỉ cần làm theo những hướng dẫn trong hình








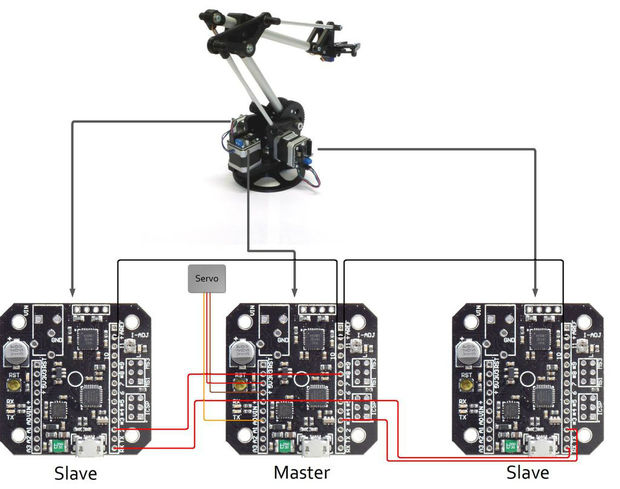
Bước 3: Lắp mạch điều khiển
Đối với cánh tay robot này ta cần sử dụng động cơ bước để hoạt động. Driver được sử dụng là usteper.
Các usteper được kết nối như hình.
Bước 4: Lập trình
Code điều khiển là mã nguồn mở, bạn có thể tải về ở đây https://github.com/uStepper/uStepper-RobotArm-Rev3
Bước 5: Tận hưởng những giây phút vui vẻ bên sản phẩm của bạn. Check https://billigastemobilabonnemang.nu/tre/.