Máy và thiết bị
Động cơ không đồng bộ ba pha
Đặc điểm cấu trúc của động cơ không đồng bộ là đơn giản, rẻ, vận hành an toàn. Tùy theo kết cấu của rotor, ta phân biệt:
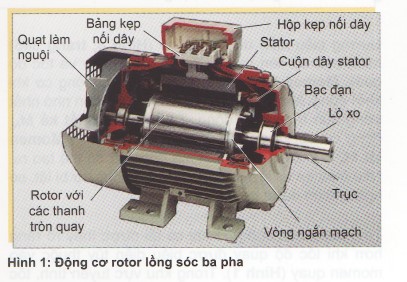
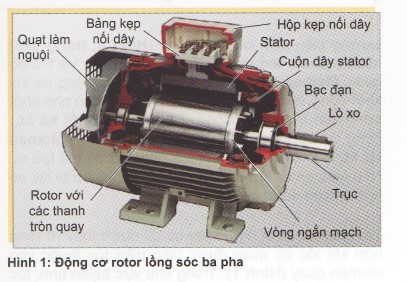
■ Động cơ lồng sóc, động cơ rotor ngắn mạch (Hình 1)
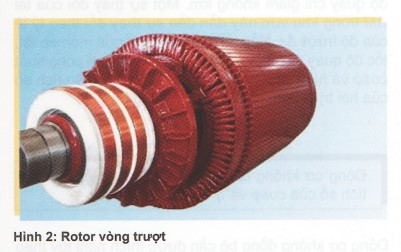
■ Động cơ vòng trượt (Hình 2)
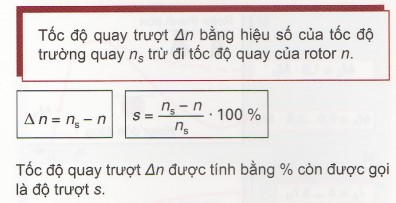
Khi nối động cơ với một điện áp xoay chiều ba pha, trường quay của Stator cảm ứng một điện áp ở rotor, làm phát sinh dòng điện. Dòng điện rotor tạo ra một từ trường làm phát sinh một momen quay. Momen này làm quay rotor cùng chiều với trường quay của stator. Rotor sẽ không bao giờ đạt tới tốc độ quay của trường quay vì nếu vậy từ thông sẽ không còn thay đổi (bằng 0), dẫn đến điện áp cảm ứng trong rotor và qua đó momen quay cũng bằng 0.
Vì động cơ này có trường quay của stator luôn quay nhanh hơn rotor (không đồng bộ), nên có tên là động cơ không đồng bộ.
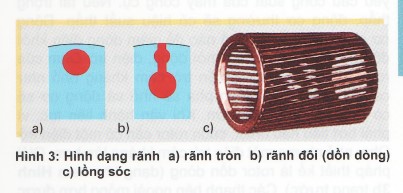
Tính năng vận hành của động cơ không đồng bộ tùy thuộc chủ yếu vào hình dạng của rotor. Rotor lồng sóc có thể được chế tạo thành rotor thanh tròn hay rotor dồn dòng (Hình 3). về nguyên tắc, tại thời điểm khởi động khi rotor còn đứng yên, động cơ không đồng bộ biểu hiện như một máy biến áp. Rotor thanh trên tác động như một cuộn cảm, điện trở Ohm của lồng sóc rất nhỏ. Do đó dòng điện rotor (CÓ thể lớn bằng 8 đến 10 lần dòng điện thiết kế) trễ gần 90° so với điện áp rotor. Sự lệch pha này cũng áp dụng cho dòng điện và điện áp của stator. Vì vậy, hệ số công suất cosφ cũng gần bằng 0. Động cơ hầu như không tiêu thụ công suất thực. Vì sự lệch pha này các momen quay riêng lẻ cũng triệt tiêu lẫn nhau và càng nhiều khi trị số cosφ tiến tới gần 0.
Hệ số công suất tăng lên theo tốc độ quay, nghĩa là độ lệch pha giữa điện áp và dòng điện rotor nhỏ đi. Do đó momen quay của động cơ không đồng bộ tăng lên.
Momen quay của động cơ không đồng bộ tùy thuộc vào tốc độ quay; rotor rãnh tròn có momen khởi động nhỏ dù dòng điện khởi động lớn.
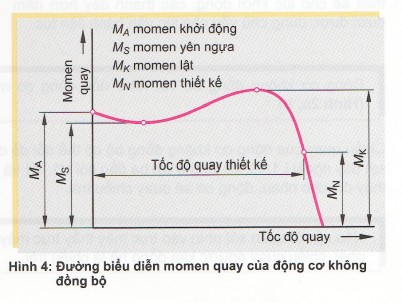
Đường biểu diễn momen quay (Hình 4) minh họa sự liên quan giữa momen quay và tốc độ quay. Momen khởi động MA là momen động cơ khi khởi động. Momen yên ngựa Ms là momen nhỏ nhất trong quá trình khởi động. Tại momen thiết kế MN, động cơ đạt được tốc độ quay thiết kế nN. Momen lật Mk là momen lớn nhất mà động cơ có thể tạo ra. Nếu momen tài lớn hơn momen lật, động cơ bị lật, có nghĩa là nó dừng lại.
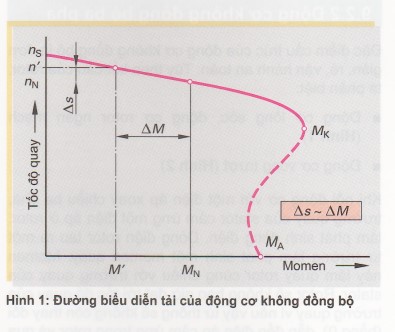
Tính năng của động cơ khi có tải được thấy rõ ràng hơn khi tốc độ quay được biểu diễn tùy thuộc vào momen quay (Hình 1). Trong khu vực tuyến tính, tốc độ quay chỉ giảm không lớn. Một sự thay đổi của tải ΔM trong khu vực này dẫn đến sự thay đổi theo tỷ lệ của độ trượt Δs. Nếu tải quá lớn vượt quá momen lật, tốc độ quay sẽ giảm xuống bằng 0. Vì hộ số công suốt coscφ và hiệu suất n đều tùy thuộc vào tài nên tích số của hai trị số trên nên càng lớn càng tốt.
Động cơ không đồng bộ được thiết kế sao cho tích số của coscφ và n đạt tối đa.
Động cơ không đồng bộ cần được thích nghi tùy theo yêu cầu công suất của máy công cụ. Nếu tải trọng thấp, động cơ thường sẽ có hiệu suất thấp. Động cơ phải thiết kế như thế nào để giảm dòng điện khởi động? Trong thời điểm khởi động, điện trở Ohm của rotor cần phải lớn và điện trở cắm kháng nhỏ như có thế. Qua đó độ lệch pha sẽ nhỏ và động cơ sẽ có momen khởi động lớn. Khi vận hành liên tục, vì phải bớt tiêu hao nhiệt, cuộn rotor cần có một điện trở Ohm nhỏ nhưng một điện trở cảm kháng lớn hơn. Giải pháp thiết kế là rotor dồn dòng (dạng khe xem Hình 3b trang trước). Các thanh bên ngoài mỏng hơn được thiết kế cho lúc khởi động, các thanh dày hơn nằm dưới được dùng chủ yếu cho lúc vận hành liên tục.
Động cơ không đồng bộ với rotor dồn dòng có momen khởi động lớn và dòng điện khởi động nhỏ (Hình 2a, b).
Chiều quay của động cơ không đồng bộ có thể đổi dễ dàng. Khi động cơ được gắn với mạng lưới điện qua ba sợi dây ngoài L1, L2 và L3 nối với ba đầu nối U1, V1 và W1, động cơ sẽ quay chiều phải. Nếu hai sợi dây ngoài thay đổi cho nhau, động cơ sẽ quay chiều trái.

Nếu người quan sát nhìn vào trục máy thấy trục máy quay theo chiều kim đồng hồ thì động cơ quay chiều phải, chiều quay ngược kim đồng hồ là chiều trái.
Trong lúc vận hành phải lưu ý tôn trọng các trị số thiết kế ghi trên biển công suất.
■ Nếu điện áp lớn hơn UN. động cơ sẽ nhanh chóng nóng lên tỷ lệ với điện áp tăng dẫn đến phá hủy các cuộn dây.
■ Nếu điện áp lưới điện quá thấp mà tải vẫn không đổi sẽ làm tăng dòng điện dẫn đến hư hại lớp cách điện của cuộn dây. Để tránh trường hợp này, tải và công suất phải giảm tỷ lệ với độ giảm điện áp.
■ Động cơ không đồng bộ cũng có thể gắn với lưới điện có tần số từ 40Hz đến 60Hz. Khi đó momen thiết kế không đổi nhưng tốc độ trường quay và công suất thay đổi theo tỷ lệ tương ứng.

Động cơ không đồng bộ có giá thành thấp, ít bảo dưỡng và không gây nhiễu. Chúng được sử dụng để vận hành các máy công cụ có công suất nhỏ tới vừa. Vì trong thời điểm khởi động, động cơ đòi lưới điện cung cấp một dòng điện lớn (từ 4 đến 10 lần dòng điện thiết kế) nên có thể gây ra sụt điện áp trong mạng cung cấp. Các công ty phân phối điện đề ra các điều kiện kỹ thuật kết nối động cơ và quy định công suất giới hạn của động cơ như sau:
-Khởi động trực tiếp: cho phép động cơ có công suất tới khoáng 4kW
-Khởi động theo các phương pháp khởi động như máy biến áp khởi động hay dùng mạch sao – tam giác.
Với phương pháp khó’! động sao – tam giác (cho động cơ tới 11 kW) động cơ được nối mạch sao khi khởi động. Nhờ đó điện áp pha giảm xuống còn 0,58 lần so với mạch tam giác và dòng điện cũng vậy. Momen khởi động giảm xuống còn 1/3. Do vậy trong phương pháp này phải lưu ý những điều kiện sau:
■ Mạch sao chỉ chuyển về mạch tam giác khi động cơ đạt được tốc độ quay thiết kế (Hình 1, 2).
■ Trong giai đoạn khởi động, động cơ không được chạy với toàn tải.
■ Trên biển công suất phải có ghi điện áp thí dụ A/Y 400/690 V. Điện áp nhò hơn là điện áp tối đa cho cuộn dây của động cơ. ở mạch sao, điện áp pha là 690 V nhưng vì hệ số liên kết là \3 nên điện áp hai đầu cuộn dây vẫn chỉ là 690 V/√3 = 400 V. Khi động cơ đạt được tốc độ quay thiết kế sẽ chuyển tiếp qua mạch tam giác. Lúc này cuộn dây có điện áp là 400 V.
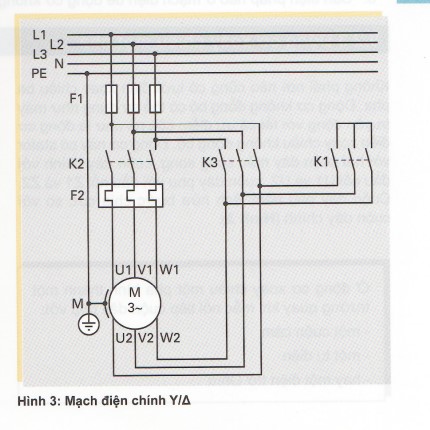
Động cơ không đồng bộ với điện áp được ghi là 400/690 V có thể được khởi động bằng phương pháp mạch sao – tam giác (Hình 3). Nếu ghi là 230/400 V thì động cơ chỉ thích hợp cho mạch sao (Phương pháp sao – tam giác sẽ phá hỏng động cơ).
Động cơ không đồng bộ được bào vệ bằng công tắc bảo vệ hay rơle bảo vệ (bộ kích hoạt lưỡng kim) hay bộ kích hoạt nhanh điện từ (bộ kích hoạt ngắn mạch).
ở động cơ vành trượt, đầu các cuộn dây rotor được nối với các vành trượt cách điện với nhau nằm trên trục máy (Hình 2b). Nhờ các giải pháp thiết kế, có thể gắn thêm vào mạch rotor những điện trở thay đổi.
Các điện trở khởi động tạo ra dòng điện khởi động nhỏ và momen khời động lớn. Sau khi đạt được tốc độ quay thiết kế, các điện trở này được nối tắt để các cuộn dây rotor hoạt động giống như trong một động cơ lồng sóc (Hình 1).
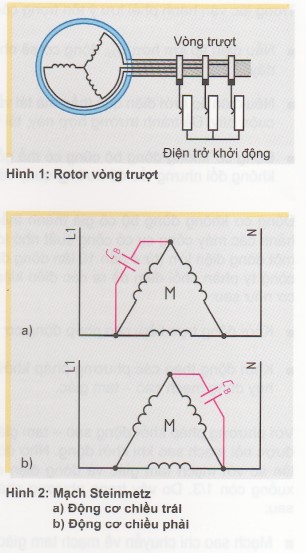
Động cơ không đồng bộ cũng có thể hoạt động với điện áp xoay chiều một pha. Tuy nhiên động cơ không thể tự khởi động được mà cần biện pháp khởi động như mạch Steinmetz. Như trong Hình 2, động cơ cổ cuộn dây Stator thiết kế cho 230/400V (mạch tam giác) cần một tụ điện vận hành CB để khởi động.
Nhờ mạch Steinmetz mà động cơ không đồng bộ có thể hoạt động với điện áp xoay chiều một pha. Momen khởi động chỉ còn bằng 30% so với điện áp xoay chiều ba pha. Công suất cùng giảm còn 80% công suất thiết kế.
Đề nâng cao tính năng khởi động, ta mắc song song với tụ điện vận hành một tụ điện khởi động CA (CA = 2CB) trong giai đoạn khởi động.