
Tự động hóa
PLC S7 200_Bài 2: Bộ điều khiển lập trình PLC – Cấu trúc và phương thức hoạt động

Bộ điều khiển lập trình PLC – Cấu trúc và phương thức hoạt động
2.1 Giới thiệu
Các thành phần của kỹ thuật điều khiển điện và điện tử ngày càng đóng một vai trò vô cùng to lớn trong lĩnh vực tự động hóa ngày càng cao. Trong những năm gần đây, bên cạnh việc điều khiển bằng Relay và khởi động từ thì việc điều khiển có thể lập trình được càng phát triển với hệ thống đóng mạch điện tử và thực hiện lập trình bằng máy tính. Trong nhiều lĩnh vực, các loại điều khiển cũ đã được thay đổi bởi các bộ điều khiển có thể lập trình được, có thể gọi là các bộ điều khiển logic khả trình, viết tắt trong tiếng Anh là PLC (Programmable Logic Controller).
Sự khác biệt cơ bản giữa điều khiển logic khả trình ( thay đổi được qui trình hoạt động) và điều khiển theo kết nối cứng (không thay đổi được qui trình hoạt động) là: Sự kết nối dây không còn nữa, thay vào đó là chương trình.
Có thể lập trình cho PLC nhờ vào các ngôn ngữ lập trình đơn giản. Đặc biệt đối với người sử dụng không cần nhờ vào các ngôn ngữ lập trình khó khăn, cũng có thể lập trình PLC được nhờ vào các liên kết logic cơ bản.
Như vậy thiết bị PLC làm nhiệm vụ thay thế phần mạch điện điều khiển trong khâu xử lý số liệu. Nhiệm vụ của sơ đồ mạch điều khiển sẽ được xác định bởi một số hữu hạn các bước thực hiện xác định gọi là chương trình. Chương trình này mô tả các bước thực hiện gọi một tiến trình điều khiển, tiến trình này được lưu vào bộ nhớ nên được gọi là điều khiển theo lập trình nhớ hay điều khiển khả trình. Trên cơ sở khác nhau ở khâu xử lý số liệu có thể biểu diễn hai hệ điều khiển như sau:
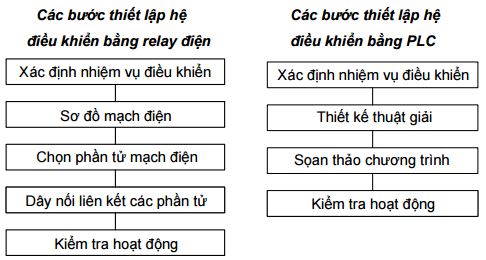
Khi thay đổi nhiệm vụ điều khiển thì người ta thay đổi mạch điều khiển: Lắp lại mạch, thay đổi các phần tử mới ở hệ điều khiển bằng relay điện. Trong khi đó khi thay đổi nhiệm vụ điều khiển ở hệ điều khiển logic khả trình (PLC) thì người ta chỉ thay đổi chương trình soạn thảo.
2.2 Sự khác nhau giữa hệ điều khiển bằng relay và hệ điều khiển bằng PLC
Sự khác nhau giữa hệ điều khiển bằng relay và hệ điều khiển bằng PLC có thể minh hoạ một cách cụ thể như sau:
Điều khiển hệ thống của 3 máy bơm qua 3 khởi động từ K1, K2, K3. Trình tự điều khiển như sau: Các khởi động từ chỉ được phép thực hiện tuần tự, nghĩa là K1 đóng trước, tiếp theo K2 đóng và cuối cùng K3 mới đóng.
Để thực hiện nhiệm vụ theo yêu cầu trên mạch điều khiển được thiết kế như sau:
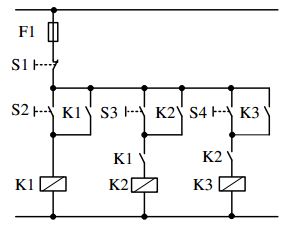
Hình 2.1: Mạch điều khiển trình tự 3 máy bơm
Khởi động từ K2 sẽ đóng khi công tắc S3 đóng với điều kiện là khởi động từ K1 đã đóng trước đó. Phương thức điều khiển như vậy được gọi là điều khiển trình tự. Tiến trình điều khiển này được thực hiện một cách cưỡng bức.
- Bốn nút nhấn S1, S2, S3, S4: Các phần tử nhập tín hiệu.
- Các tiếp điểm K1, K2, K3 và các mối nối liên kết là các phần tử xử lý.
- Các khởi động từ K1, K2, K3 là kết quả xử lý.
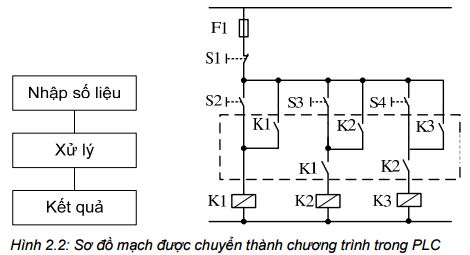
Nếu thay đổi mạch điện điều khiển ở phần xử lý bằng hệ PLC ta có thể biểu diễn hệ thống như sau:
- Phần tử vào: Các nút nhấn S1, S2, S3, S4 vẫn giữ nguyên.
- Phần tử ra: Ba khởi động từ K1, K2, K3, để đóng và mở ba máy bơm vẫn giữ nguyên.
- Phần tử xử lý: Được thay thế bằng PLC.
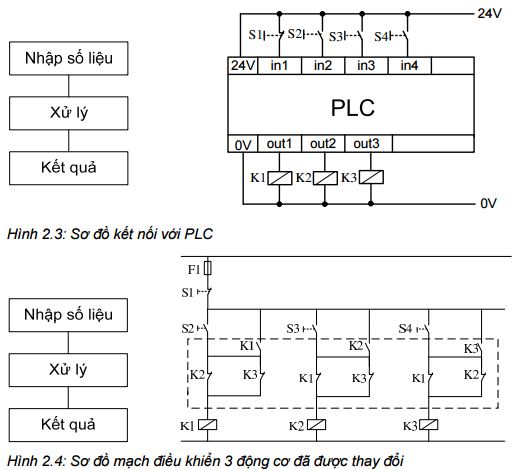
Sơ đồ kết nối với PLC được cho như ở hình 2.3. Trình tự đóng mở theo yêu cầu đề ra sẽ được lập trình, chương trình sẽ được nạp vào bộ nhớ.
Bây giờ giả thiết rằng nhiệm vụ điều khiển sẽ thay đổi. Hệ thống ba máy bơm vẫn giữ nguyên, nhưng trình tự được thực hiện như sau: chỉ đóng được hai trong ba máy bơm hoặc mỗi máy bơm có thể hoạt động một cách độc lập. Như vậy theo yêu cầu mới đối với hệ thống điều khiển bằng relay điện phải thiết kế lại mạch điều khiển, sơ đồ lắp ráp phải thực hiện lại hoàn toàn mới. Sơ đồ mạch điều khiển biễu diễn như hình 2.4.
Như vậy mạch điều khiển sẽ thay đổi rất nhiều nhưng phần tử đưa tín hiệu vào và ra vẫn giữ nguyên, chi phí cho nhiệm vụ mới sẽ cao hơn.
Nếu ta thay đổi hệ điều khiển trên bằng hệ điều khiển lập trình PLC, khi nhiệm vụ điều khiển thay đổi thì thực hiện sẽ nhanh hơn và đơn giản hơn bằng cách thay đổi lại chương trình.
Hệ điều khiển lập trình PLC có những ưu điểm sau:
- Thích ứng với những nhiệm vụ điều khiển khác nhau.
- Khả năng thay đổi đơn giản trong quá trình đưa thiết bị vào sử dụng.
- Tiết kiệm không gian lắp đặt.
- Tiết kiệm thời gian trong quá trình mở rộng và phát triển nhiệm vụ điều khiển bằng cách copy các chương trình.
- Các thiết bị điều khiển theo chuẩn.
- Không cần các tiếp điểm.
- v.v…
Hệ thống điều khiển lập trình PLC được sử rộng rất rộng rãi trong các ngành khác nhau:
- Điều khiển thang máy.
- Điều khiển các quá trình sản xuất khác nhau: sản suất bia, sản xuất xi măng v.v ….
- Hệ thống rửa ô tô tự động.
- Thiết bị khai thác .
- Thiết bị đóng gói bao bì, tự động mạ và tráng kẽm v.v …
- Thiết bị sấy.
2.3 Cấu trúc của một PLC
Các bộ điều khiển PLC được sản xuất theo dòng sản phẩm. Khi mới xuất xưởng, chúng chưa có một chương trình cho một ứng dụng nào cả. Tất cả các cổng logic cơ bản, chức năng nhớ, timer, counter .v.v… được nhà chế tạo tích hợp trong chúng và được kết nối với nhau bằng chương trình được viết bởi người dùng cho một nhiệm vụ điều khiển cụ thể nào đó. Bộ điều khiển PLC có nhiều loại khác nhau và được phân biệt với nhau qua các thành phần sau:
- Các ngõ vào và ra
- Dung lượng nhớ
- Bộ đếm (counter)
- Bộ định thời (timer)
- Bit nhớ
- Các chức năng đặc biệt
- Tốc độ xử lý
- Loại xử lý chương trình.
- Khả năng truyền thông.
Các bộ điều khiển lớn thì các thành phần trên được lắp thành các modul riêng. Đối với các bộ điều khiển nhỏ, chúng được tích hợp trong bộ điều khiển. Các bộ điều khiển nhỏ này có số lượng ngõ vào/ra cho trước cố định.
Bộ điều khiển được cung cấp tín hiệu bởi các tín hiệu từ các cảm biến ở ngõ vào của nó. Tín hiệu này được xử lý tiếp tục thông qua chương trình điều khiển đặt trong bộ nhớ chương trình. Kết quả xử lý được đưa ra ngõ ra để đến đối tượng điều khiển hay khâu điều khiển ở dạng tín hiệu.
Cấu trúc của một PLC có thể được mô tả như hình vẽ sau:
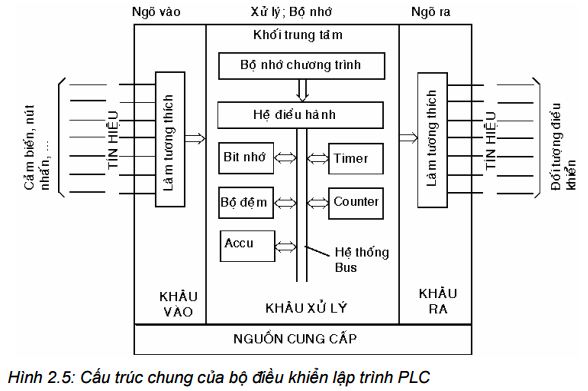
- Bộ nhớ chương trình
Bộ nhớ chương trình trong PLC là một bộ nhớ điện tử đặc biệt có thể đọc được. Nếu sử dụng bộ nhớ đọc-ghi được (RAM), thì nội dung của nó luôn luôn được thay đổi ví dụ như trong trường hợp vận hành điều khiển. Trong trường hợp điện áp nguồn bị mất thì nội dung trong RAM có thể vẫn được giữ lại nếu như có sử dụng Pin dự phòng.
Nếu chương trình điều khiển làm việc ổn định, hợp lý, nó có thể được nạp vào một bộ nhớ cố định, ví dụ như EPROM, EEPROM. Nội dung chương trình ở EPROM có thể bị xóa bằng tia cực tím.
- Hệ điều hành
Sau khi bật nguồn cung cấp cho bộ điều khiển, hệ điều hành của nó sẽ đặt các counter, timer, dữ liệu và bit nhớ với thuộc tính non-retentive (không được nhớ bởi Pin dự phòng) cũng như ACCU về 0.
Để xử lý chương trình, hệ điều hành đọc từng dòng chương trình từ đầu đến cuối. Tương ứng hệ điều hành thực hiện chương trình theo các câu lệnh.
- Bit nhớ (Bit memoryt)
Các bit memory là các phần tử nhớ, mà hệ điều hành ghi nhớ trạng thái tín hiệu.
- Bộ đệm (Proccess Image)
Bộ đệm là một vùng nhớ, mà hệ điều hành ghi nhớ các trạng thái tín hiệu ở các ngõ vào ra nhị phân.
- Accumulator
Accumulator là một bộ nhớ trung gian mà qua nó timer hay counter được nạp vào hay thực hiện các phép toán số học.
- Counter, Timer
Timer và counter cũng là các vùng nhớ, hệ điều hành ghi nhớ các giá trị đếm trong nó.
- Hệ thống Bus
Bộ nhớ chương trình, hệ điều hành và các modul ngoại vi (các ngõ vào và ngõ ra) được kết nối với PLC thông qua Bus nối. Một Bus bao gồm các dây dẫn mà các dữ liệu được trao đổi. Hệ điều hành tổ chức việc truyền dữ liệu trên các dây dẫn này.
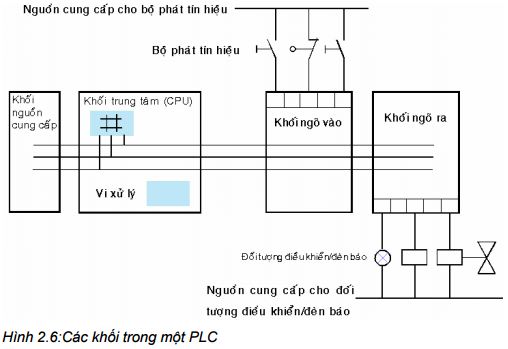
2.4. Các khối của PLC
Các khối khác nhau của một PLC được cho như hình 2.6.
2.4.1 Khối cung cấp nguồn
Khối nguồn có nhiệm vụ biến đổi điện áp lưới (110V hay 220V ) thành điện áp thấp hơn cung cấp cho các khối của thiết bị tự động. Điện áp này là 24VDC. Các điện áp cho cảm biến, thiết bị điều chỉnh và các đèn báo nằm trong khoảng (24…220V) có thể được cung cấp thêm từ các nguồn phụ ví dụ như biến áp.
2.4.2 Bộ nhớ chương trình
Các phần tử nhớ là các linh kiện mà thông tin có thể được lưu trữ (được nhớ) trong nó ở dạng tín hiệu nhị phân. Trong PLC các bộ nhớ bán dẫn được sử dụng làm bộ nhớ chương trình. Một bộ nhớ bao gồm 512, 1024, 2048 . ..phần tử nhớ, các phần tử nhớ này sắp đặt theo các địa chỉ từ 0 tới 511, 1023 hoặc 2047 . . .. Thông thường số lượng của các phần tử nhớ trong một bộ nhớ cho biết dung lượng của nó là bao nhiêu kilobyte (1kB = 1024 byte). Trong mỗi ô nhớ có thể mô tả một câu lệnh điều khiển nhờ thiết bị lập trình. Mỗi phần tử nhị phân của một ô nhớ có thể có trạng thái tín hiệu “0” hoặc “1”. Sơ đồ của một bộ nhớ chương trình được cho như hình 2.7.
- Bộ nhớ đọc-ghi RAM (random-access memory)
Bộ nhớ ghi-đọc có 1 số lượng các ô nhớ xác định. Mỗi ô nhớ có 1 dung lượng nhớ cố định và nó chỉ tiếp nhận 1 lượng thông tin nhất định. Các ô nhớ được ký hiệu bằng các địa chỉ riêng của nó. Bộ nhớ này chứa các chương trình còn sửa đổi hoặc các dữ liệu, kết quả tạm thời trong quá trình tính toán, lập trình. Đặc điểm của loại này là dữ liệu sẽ mất đi khi hệ thống mất điện. RAM được hình dung như một tủ chứa có nhiều ngăn kéo. Mỗi ngăn kéo được đánh số một địa chỉ và người ta có thể cất vào hoặc lấy các dữ liệu ra.
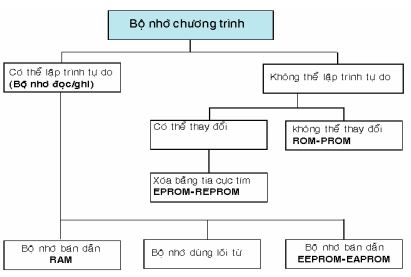
Hình 2.7: Sơ đồ một bộ nhớ chương trình
- Bộ nhớ cố định ROM (read-only memory)
Bộ nhớ cố định (ROM) chứa các thông tin không có khả năng xóa được và không thể thay đổi được. Các thông tin này do các nhà sản xuất viết ra và không thể thay đổi được. Chương trình trong bộ nhớ ROM có nhiệm vụ sau:
- Điều khiển và kiểm tra các chức năng hoạt động của CPU. Được gọi là hệ điều hành.
- Dịch ngôn ngữ lập trình thành ngôn ngữ máy.
Một ROM có thể so sánh với một quyển sách. Trong đó nó chứa các thông tin cố định, không thể thay đổi được và ta chỉ đọc các thông tin đó mà thôi. Đặc điểm của loại này là dữ liệu vẫn tồn tại khi mất điện.
- EPROM (eraseable read-only memory)
EPROM là một bộ nhớ cố định có thể lập trình và xóa được. Nội dung của EPROM có thể xóa bằng tia cực tím và có thể lập trình lại.
- EEPROM (electrically eraseable read-only memory)
EEPROM là bộ nhớ cố định có thể lập trình và xóa bằng điện. Mỗi ô nhớ trong EEPROM cho phép lập trình và xóa bằng điện.
2.4.3 Khối trung tâm (CPU)
Khối CPU là loại khối có chứa bộ vi xử lý, hệ điều hành, bộ nhớ, các bộ thời gian, bộ đếm, cổng truyền thông … và có thể còn có một vài cổng vào ra số. Các cổng vào ra số có trên CPU được gọi là cổng vào/ra onboard.
2.4.4 Khối vào
Các ngõ vào của khối này sẽ được kết nối với các bộ chuyển đổi tín hiệu và biến đổi các tín hiệu này thành tín hiệu phù hợp với tín hiệu xử lý của CPU. Dựa vào loại tín hiệu vào sẽ có các khối ngõ vào tương ứng. Gồm có hai loại khối vào cơ bản sau:
- Khối vào số (DI: Digital Input):
Các ngõ vào của khối này được kết nối với các bộ chuyển đổi tạo ra tín hiệu nhị phân như nút nhấn, công tắc, cảm biến tạo tín hiệu nhị phân
.v.v… Do tín hiệu tại ngõ vào có thể có mức logic tương ứng với các điện áp khác nhau, do đó khi sử dụng cần phải chú ý đến điện áp cần thiết cung cấp cho khối vào phải phù hợp với điện áp tương ứng mà bộ chuyển đổi tín hiệu nhị phân tạo ra.
Ví dụ: Các nút nhấn, công tắc được nối với nguồn 24VDC thì yêu cầu phải sử dụng khối vào có nguồn cung cấp cho nó là 24VDC.
- Khối vào tương tự (AI: Analog Input):
Khối này có nhiệm vụ biến đổi tín hiệu tương tự (hay còn gọi là tín hiệu analog) thành tín hiệu số. Các ngõ vào của khối này được kết nối với các bộ chuyển đổi tạo ra tín hiệu analog như cảm biến nhiệt độ (Thermocouple), cảm biến lưu lượng, ngõ ra analog của biến tần .v.v…Khi sử dụng các khối vào analog cần phải chú ý đến loại tín hiệu analog được tạo ra từ các bộ chuyển đổi (cảm biến)
Ví dụ: Các cảm biến tạo ra tín hiệu analog là dòng điện (4..20 mA) thì phải sử dụng ngõ vào analog là loại nhận tín hiệu dòng điện (4..20 mA). Nếu cảm biến tạo ra tín hiệu analog là điện áp (0..5V) thì phải sử dụng ngõ vào analog nhận tín hiệu là điện áp (0..5V).
2.4.5 Khối ra
Khối này có nhiệm vụ khuếch đại các tín hiệu sau xử lý của CPU (được gởi đến vùng đệm ra) cung cấp cho đối tượng điều khiển là cuộn dây, đèn báo, van từ .v.v.. Tùy thuộc vào đối tượng điều khiển nhận tín hiệu dạng nào mà sẽ có các khối ra tương ứng. Gồm có hai loại khối ra tiêu biểu:
- Khối ra số (DO: Digital Output):
Các ngõ ra của khối này được kết nối với các đối tượng điều khiển nhận tín hiệu nhị phân như đèn báo, cuộn dây relay .v.v…Vì đối tượng điều khiển nhận tín hiệu nhị phân sử dụng nhiều cấp điện áp khác nhau nên khi sử dụng các khối ra số cần phải chú ý đến điện áp cung cấp cho nó có phù hợp với điện áp cung cấp cho đối tượng điều khiển hay không. Theo loại điện áp sử dụng, ngõ ra số được phân thành hai loại:
- Điện áp một chiều (DC: Direct Current): Gồm có hai loại ngõ ra là Transistor và relay. Thông thường trong công nghiệp điện áp một chiều được sử dụng là 24V.
- Điện áp xoay chiều (AC: Alternative Current): Gồm có hai loại ngõ ra là relay và TRIAC.
- Khối ra tương tự (AO: Analog Output):
Khối này có nhiệm vụ biến đổi tín hiệu số được gởi từ CPU đến đối tượng điều khiển thành tín hiệu tương tự. Các ngõ ra của khối này được kết nối với các đối tượng điều khiển nhận tín hiệu tương tự như ngõ vào analog của biến tần, van tỷ lệ, .v.v… Khi sử dụng các ngõ ra tương tự cần chú ý đến loại tín hiệu tương tự cung cấp cho đối tượng điều khiển có phù hợp với tín hiệu tương tự mà đối tượng điều khiển cần nhận hay không.
Ví dụ: Ngõ vào analog của biến tần nhận tín hiệu là điện áp (0..10V) thì nhất thiết phải sử dụng ngõ ra tương tự tạo ra tín hiệu analog là điện áp (0..10V).
2.4.6 Các khối đặc biệt
Ngoài ra còn có một số khối khác đảm nhận các chức năng đặc biệt như xử lý truyền thông, thực hiện các chức năng đặc biệt như: điều khiển vị trí, điều khiển vòng kín, đếm tốc độ cao .v.v…
Tùy thuộc vào từng loại PLC mà các khối trên có thể ở các dạng module riêng hoặc được tích hợp chung trong khối xử lý trung tâm (CPU).
2.5 Phương thức thực hiện chương trình trong PLC
Hình vẽ minh họa việc xử lý chương trình trong CPU được cho như hình 2.8
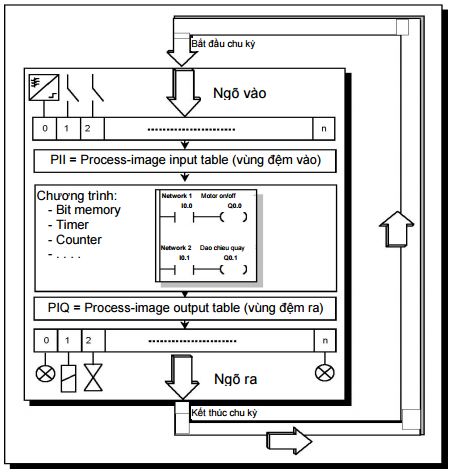
Hình 2.8: Chu kỳ quét trong PLC
PLC thực hiện chương trình cheo chu trình lặp. Mỗi vòng lặp được gọi là vòng quét (scan). Mỗi vòng quét được bắt đầu bằng giai đoạn chuyển dữ liệu từ các cổng vào số tới vùng bộ đệm ảo ngõ vào (I), tiếp theo là giai đoạn thực hiện chương trình. Trong từng dòng quét, chương trình được thực hiện từ lệnh đầu tiên đến lệnh kết thúc. Sau giai đoạn thực hiện chương trình là giai đoạn chuyển các nội dung của bộ đệm ảo ngõ ra (Q) tới các cổng ra số. Vòng quét được kết thúc bằng giai đoạn truyền thông nội bộ và kiểm tra lỗi.
Thời gian cần thiết để PLC thực hiện được một vòng quét gọi là thời gian vòng quét (Scan time). Thời gian vòng quét không cố định, tức là không phải vòng quét nào cũng được thực hiện trong một khoảng thời gian như nhau. Có vòng quét thực hiện lâu, có vòng quét thực hiện nhanh tùy thuộc vào số lệnh trong chương trình được thực hiện, vào khối lượng dữ liệu truyền thông … trong vòng quét đó.
Như vậy giữa việc đọc dữ liệu từ đối tượng để xử lý, tính toán và việc gửi tín hiệu điều khiển tới đối tượng có một khoảng thời gian trễ đúng bằng thời gian vòng quét. Nói cách khác, thời gian vòng quét quyết định tính thời gian thực của chương trình điều khiển trong PLC. Thời gian quét càng ngắn, tính thời gian thực của chương trình càng cao.
Tại thời điểm thực hiện lệnh vào/ra, thông thường lệnh không làm việc trực tiếp với cổng vào/ra mà chỉ thông qua bộ đệm ảo của cổng trong vùng nhớ tham số. Việc truyền thông giữa bộ đệm ảo với ngoại vi do hệ điều hành CPU quản lý. Ở một số module CPU, khi gặp lệnh vào/ra ngay lập tức, hệ thống sẽ cho dừng mọi công việc khác, ngay cả chương trình xử lý ngắt, để thực hiện lệnh trực tiếp với cổng vào/ra.