
Vi điều khiển
Chế thùng rác tự động

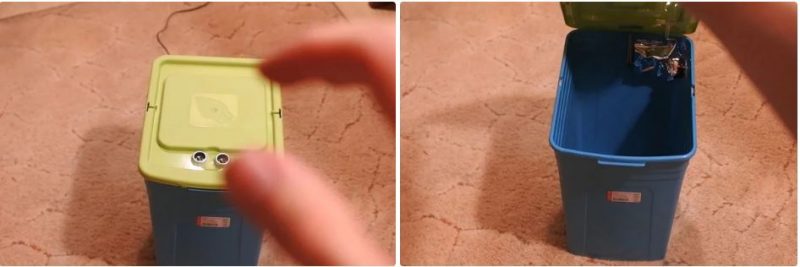
Chào. Dự án này là về thùng rác robo, nó sẽ mở nắp của nó nếu bạn đưa tay lên phía trên nó. Thùng rác sẽ mở nắp trong 10 giây nếu bạn đặt tay của bạn cao hơn nắp từ 10 đến 30 cm và trong 3 giây nếu tay bạn ở khoảng cách từ 30 đến 70 cm. Chế độ này là để ném nhanh mọi thứ. Ngoài ra thùng rác có một công tắc cho dịch vụ. Vì vậy, nắp được mở trong khi công tắc được nhấn.
Bạn có thể xem tất cả quá trình trên video của tôi
Bước 1: Tất cả những gì chúng ta cần
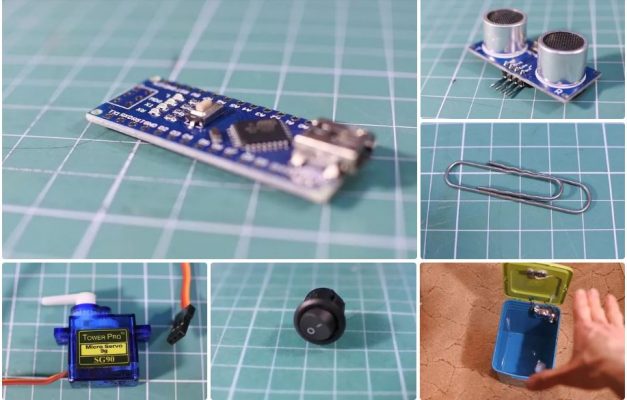
Bộ não của tất cả các hệ thống là arduino, vì vậy bạn có thể thay đổi mọi khoảng cách và thời gian rất dễ dàng, chỉnh sửa bản phác thảo. Cảm biến là cảm biến siêu âm phạm vi giá rẻ cho arduino và bộ truyền động là động cơ servo. Thanh kết nối tôi sẽ làm bằng kẹp giấy.
- Arduino nano
- Cảm biến siêu âm
- Servo
Bước 2: Xây dựng cơ chế
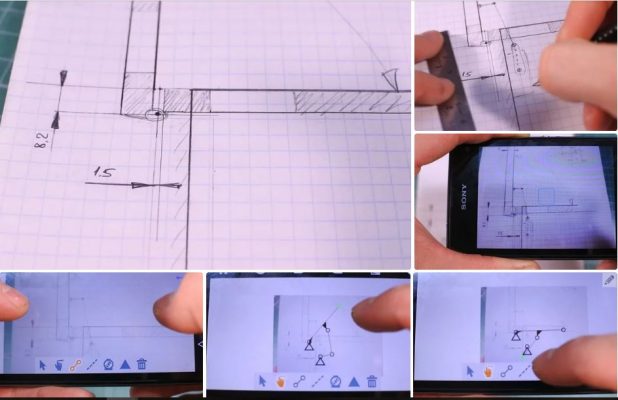

Tôi loại bỏ tất cả các bộ phận nhựa vô dụng từ thùng rác. Tôi quyết định thiết kế cơ chế mở, vì vậy tôi đo tất cả các phần của cơ chế và tạo phác thảo trên giấy ở quy mô thực. Cap được hiển thị ở 2 vị trí, mở và đóng. Cơ chế rất đơn giản: có một bản lề trên nắp và thanh kết nối với servo. Nhưng cơ chế này sẽ cho phép hoạt động? Chúng ta hãy tìm ra nó, sử dụng chuyển động hiệu ứng lực autodesk.
iTunes download link
Google Play download link
Tôi chụp ảnh bản phác thảo của mình và tải nó lên trong ứng dụng hiệu ứng lực. Trong ứng dụng này, tôi có thể xây dựng cơ chế của mình và khám phá nó. Servo có thể bật góc 180 độ, vì vậy nắp không thể đóng. Tôi thay đổi một số kích thước và cơ chế hoạt động hoàn hảo, tôi thích nó. Bây giờ, nhìn vào bản phác thảo này, tôi thực hiện một số chỉnh sửa trong bản phác thảo của mình. Và sử dụng bản phác thảo của tôi, tôi có thể tìm thấy tất cả các kích thước bằng cách đo chúng theo quy tắc! Bây giờ chúng tôi đã sẵn sàng để xây dựng nó.
Bước 3: Tạo bản lề

Tôi sẽ làm một bản lề từ một kim loại tincan. Chỉ cần cắt bỏ một số dải, gấp nó và đánh dấu một trục. Uốn cong một số chân và tạo một lỗ cho trục. Tôi chỉ dán nó vào nắp, vì vậy xử lý cả hai bề mặt với mài mòn và keo.
Bước 4: Gắn Servo

Tạo một dấu cho vị trí trục của servo, như trên bản phác thảo. Tạm thời gắn servo bằng băng keo và đánh dấu 4 lỗ để cố định servo bằng dây cáp.
Bây giờ tôi đang làm một trục kết nối của kẹp giấy lớn. Chèn nó vào bản lề và servo. Cuối cùng tôi cũng uốn cong cái kẹp giấy để sửa nó.
Bước 5: Gắn cảm biến siêu âm
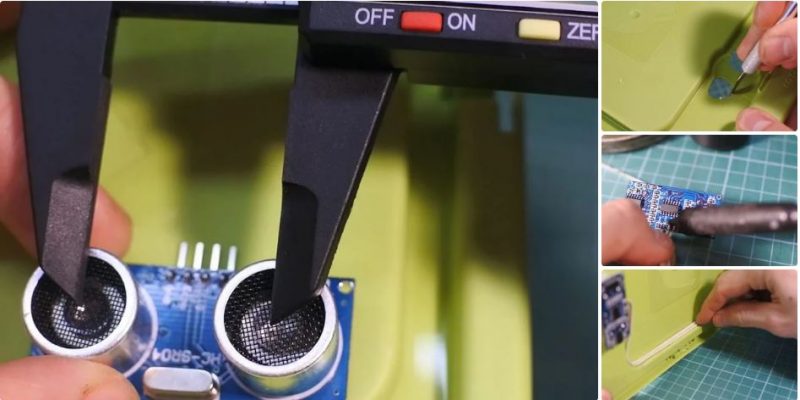
Đã đến lúc gắm cảm biến siêu âm Lấy một số kích thước và đánh dấu chúng trên nắp và tạo các lỗ cần thiết. Kết nối dây với cảm biến và cố định tất cả trên nắp bằng keo nóng.
Bước 6: Nút nhấn

Tạo một lỗ cho công tắc ở phía bên của thùng rác, dây hàn và đặt nút nhấn.
Bước 7: Sơ đồ và phác thảo
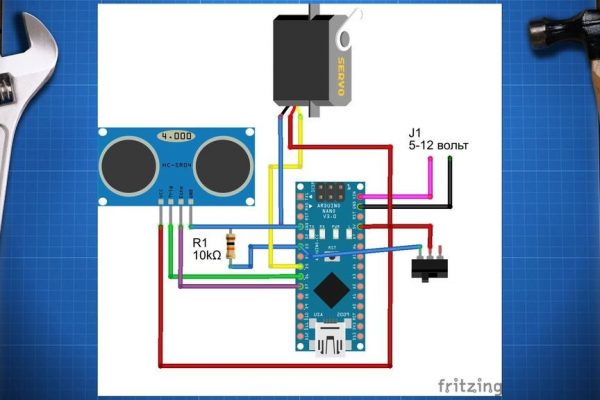
Vì vậy, bạn có thể thay đổi tất cả khoảng cách và thời gian trong bản phác thảo. Ngoài ra, đo khoảng cách là trung bình cộng của 3 lần đo.
Bước 8: Cao su

Bạn có thể thấy rằng servo yếu, vì vậy việc đóng nắp nhanh hơn mở nó, đó là do trọng lực. Chúng ta hãy sửa nó với bộ tích lũy năng lượng cơ học đơn giản nhất – một loại cao su. Cao su sẽ kéo dài khi giản và nén khi tăng, giúp servo mở nắp.
Bước 9: Nguồn
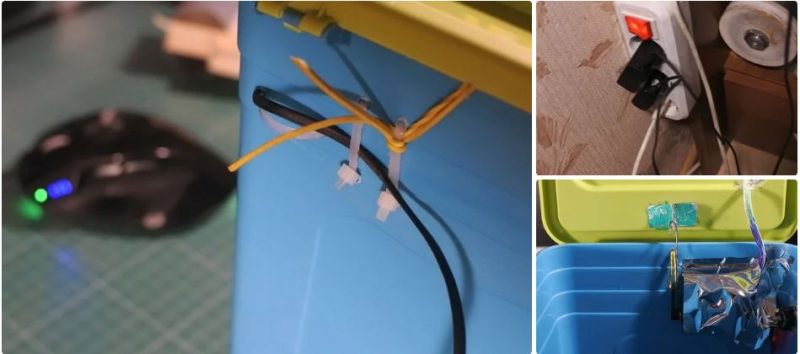
Bạn có thể cung cấp năng lượng cho hệ thống này bằng cách cung cấp năng lượng dc. Tất cả các thiết bị điện tử tôi sửa bằng dây cáp và bọc bằng băng keo trong suốt. Ngoài ra, bạn có thể xây dựng tất cả các cơ chế bên ngoài thùng rác, nhưng tôi muốn tạo ra thùng rác robo bình thường, chỉ cần một cảm biến được hiển thị.
Bước 10: Kết thúc.
Nên nối trực tiếp nguồn cho servo và không nên lấy nguồn cho servo từ Arduino.