
Vi điều khiển
Hướng dẫn làm đèn robot Pixar


Giới thiệu
Pixar nổi tiếng với đèn Luxo Jr. Tôi thích nhân vật đèn rất nhiều, tôi thực sự muốn tự mình tương tác với nó. Do đó tôi đã tạo một cánh tay robot.
May mắn thay, tôi không phải bắt đầu từ đầu.
Dự án này thực sự được xây dựng trên hai dự án khác nhau
– cánh tay robot: http://www.thingiverse.com/thing:2433/#files
– Mô hình 3D của Luxo Jr.: http://www.thingiverse.com/thing:432648/#files
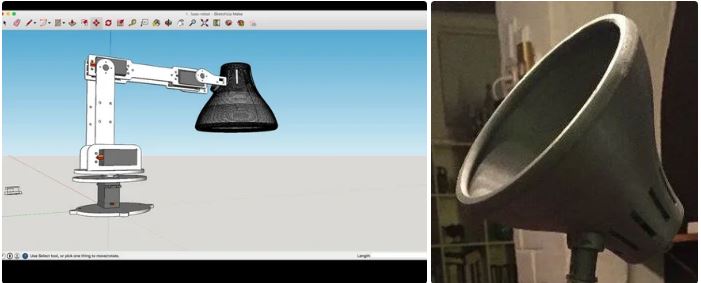
Tôi đã kết hợp cánh tay robot và đèn Luxo trong tệp .sketch.
MoSCoW
Những điều cần thực hiện:
– Điều khiển động cơ
– Đế in 3D (phần dưới)
– Bóng đèn in 3D (phần trên cùng)
– Phần cánh tay robot được cắt bằng laser
Nên dùng:
– Đèn RGB
– Ghi lại hình động của riêng bạn
Có thể:
– Thêm hoạt hình Pixi Jr (dựa trên phần giới thiệu Pixar)
Nên:
– Xây dựng một phiên bản lớn
Bộ phận đồ cần thiết:
– Triplex 3 mm
– PLA (cho các bộ phận 3D)
– 6 servo (1 servo cấu hình thấp cho đế và 5 động cơ mô-men xoắn cao)
– Intel Edison (có thể được thực hiện với Raspberry Pi hoặc bất kỳ vi điều khiển nào khác)
– Dây dẫn
– 2 Bộ nguồn điều hợp (Intel Edison, servo)
– Lắp GU10 (cho bóng đèn)
– Keo nến
– Khung đế (tăng trọng lượng cho đế)
—
– Kiến thức kỹ thuật
– Kinh nghiệm lập trình (tùy chọn)
Bước 1: Tải tập tin
Đồng thời tải xuống các tệp từ: http://www.thingiverse.com/thing:2433
Tussenstukje_afstandhouder_1.stl
Tussenstukje_afstandhouder_2.stl
Bước 2: Cắt Laser & In 3D

Có một vài điều mà chúng ta cần trước khi có thể bắt đầu xây dựng.
– Cắt Laser cánh tay robot
– In 3D vỏ đèn
– In 3D chân đèn (phần này được in thành hai phần)
Bước 3: Hoàn thiện giai đoạn chuẩn bị

Bây giờ chúng tôi có tất cả các bộ phận và chúng ta có thể bắt đầu lắp ráp!
– Gắn servo vào phần dưới cùng
Phần dưới cùng được in thành hai mảnh riêng biệt vì nó quá lớn. Tôi đã sử dụng keo nóng để dán chúng lại với nhau. Tôi cũng dán servo vào phần dưới cùng.
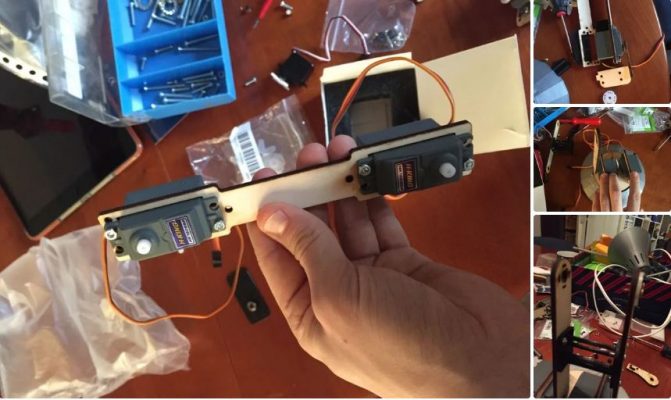
– Vặn tấm gỗ vào servo, gắn vào tấm dưới cùng và gắn hai động cơ điều khiển cánh tay dưới
Vặn tấm gỗ vào servo gắn vào tấm dưới cùng. Khi bạn gắn hai động cơ servo trên tấm điều khiển cánh tay dưới, hãy chắc chắn rằng chúng bắt đầu ở cùng một vị trí. Cũng đặt các servo ở đúng nơi (lỗ trên gỗ). Bạn có thể làm điều này bằng cách xoay các servo theo cùng một hướng cho đến khi chúng không thể di chuyển thêm nữa. Điều này khá quan trọng vì hai servo này sẽ được kết nối sau này.
Bước 4: Gắn cánh tay và thêm sự ổn định
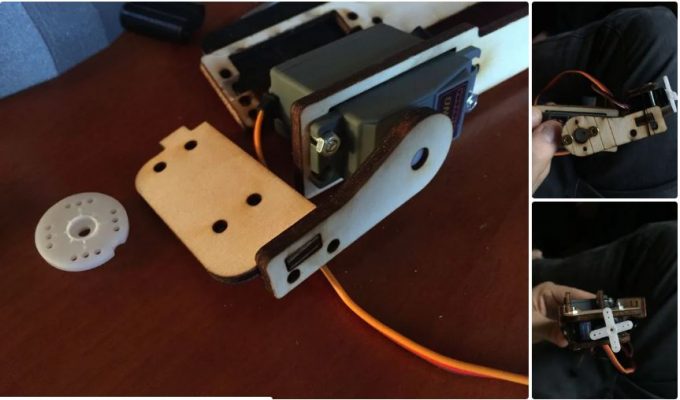
Lắp ráp cánh tay trên
Thêm các servo vào cánh tay trên và vít nó lại với nhau. Ở đây chỉ cần làm theo ý nghĩa thông thường của bạn, các bộ phận cắt laser là hướng dẫn tốt nhất.
Dán keo mọi thứ!
Khi tôi chắc chắn rằng mọi thứ đã ở đúng vị trí, tôi dán hầu hết các phần lại với nhau (những phần tôi chắc chắn sẽ không thay đổi!)
Tính ổn định
Tôi cũng đã in một số vật liệu bổ sung làm cho công trình mạnh hơn một chút, đây là tùy chọn nhưng được khuyến nghị.
Bước 5: Xoay đèn

Để di chuyển đèn lên, xuống, trái và phải có hai động cơ. Một để bật đèn lên xuống và một servo để xoay đèn. Một lần nữa, không có gì thực sự phức tạp ở đây chỉ cần cố định theo các lỗ trên gỗ.
Gắn phụ kiện,
gắn phụ kiện GU10 vào bóng đèn in 3D bằng keo nóng
Chúng ta sắp hoàn thành với cánh tay robot!
Gắn cả hai servo vào cánh tay robot và sẵn sàng gắn đèn. Vặn bóng đèn in 3D lên tấm ván gỗ. Bạn có thể làm điều này sau khi mọi thứ đã hoạt động, nhưng hãy chắc chắn rằng đầu thực sự hoạt động và điều quan trọng là phải kiểm tra điều đó trước khi bạn tiếp tục.
Bước 6: Dọn dẹp dây điện
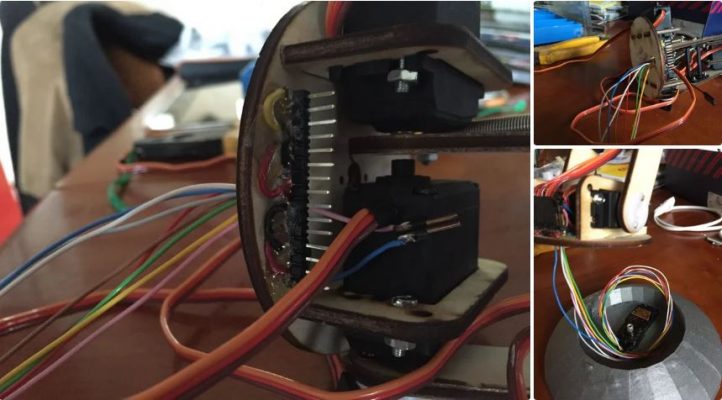
Pixi Jr. chứa rất nhiều dây. Bởi vì nó sử dụng 5 servo, tất cả đều chứa ba dây và cáp cho bóng đèn. Nó đòi hỏi một số sáng tạo để bao quát mọi thứ độc đáo. Tôi đã làm mọi thứ dễ dàng hơn một chút bằng cách sử dụng hai phích cắm điện khác nhau, một cho Intel Edison + servo và một cho bóng đèn
Đừng quên: nó có thể xoay!
Hãy chắc chắn rằng bạn có một sợi dây thật dài cuộn dưới chân để dây không bị đứt khi đèn đang quay.
Trong cơ sở có một số không gian cho đối trọng
tôi đã thêm khung đế vào đế để ngăn đèn bị lật. Khi nó mở rộng hoàn toàn, có rất nhiều lực trên đèn.
Bước 7: Chiêm ngưỡng phần cứng của bạn

Chúng ta làm được rồi!
Một điều tôi đã không đề cập đến là trọng lượng trên đèn
Phần đế của tôi đã không giữ nó và khiến đèn bị đổ. Tôi gắn ba lò xo để giữ cho đèn ổn định hơn, nhưng nó vẫn không hoàn hảo. Nếu bất cứ ai có một giải pháp tốt hơn, xin vui lòng cho tôi biết.
Bước 8: Bắt đầu phần mềm (với phần mềm ảo hóa!)
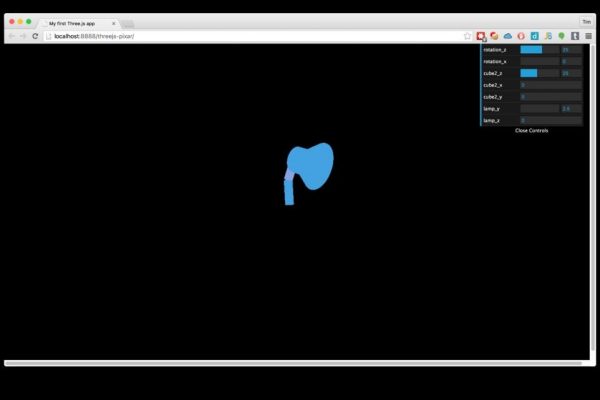
Được rồi, trước khi chúng ta bắt đầu với thực tế … Tôi đã xây dựng một ứng dụng Javascript trong Three.js để mô phỏng chuyển động của đèn. Ý tưởng là bạn đặt các giá trị trong chương trình này, sau khi bạn nhập các giá trị bạn có thể đưa nó lên đèn và các servo sẽ nhảy đến vị trí đó. Tuyệt đúng không?!
Bước 9: Kết nối dây điện.

Như tôi đã đề cập trước đây, Intel Edison chỉ có thể điều khiển 4 chân PWM tại thời điểm đó. Điều này không lý tưởng vì tôi sử dụng 5 servo. Đó là lý do tại sao tôi sử dụng phần mềm PWM cho 1 servo.
Tôi đã sử dụng chân 3,5,6,9 như các chân PWM thông thường và 11 như là phần mềm PWM. Tôi hàn tất cả các chân nối đất vào cùng một dây sao cho chỉ cần 1 chân tiếp đất. Nguồn điện đến từ một bộ chuyển đổi 5V riêng biệt cung cấp năng lượng cho tất cả các servo.
Bước 10: Lập trình Pixar Jr
Liên kết với Github của tôi: https://github.com/Timvdv/pixar-lamp-intel-edison
Trước khi chúng ta bắt đầu viết code, có một vài điều cần lưu ý.
Tôi đã sử dụng Intel Edison làm bộ điều khiển với node.js làm ngôn ngữ lập trình của mình.
Chuyển tiếp trơn tru giữa các servo.
Chúng tôi sẽ không xây dựng điều này từ đầu. Ai đó đã viết chính xác thứ chúng ta cần: http://johnny-five.io
Tôi cũng đã sử dụng một số thư viện khác để làm cho năm johnny tương thích với Intel Edison.
Hạn chế Intel Edison
Vấn đề lớn nhất trong phần mềm là Intel Edison chỉ điều khiển 4 chân PWM cùng lúc trong khi tôi có 5 servo. Điều này có nghĩa là tôi đã phải gửi PWM của servo thứ 5 bằng tay, điều này làm cho nó kém đi một chút.
Chạy code
Tôi giả sử Intel Edison của bạn đang hoạt động và chạy với các chân được kết nối ở cổng bên phải và bạn đã cài đặt GIT.
(raw sketch -> untested)
– SSH vào edison của bạn
– CD để dir của bạn về: `cd ~`
– Clone code từ tài khoản github của tôi: git clone https://github.com/Timvdv/pixar-lamp-intel-edison…
– CD vào thư mục
– Chạy cài đặt NPM để cài đặt phụ thuộc `npm install`
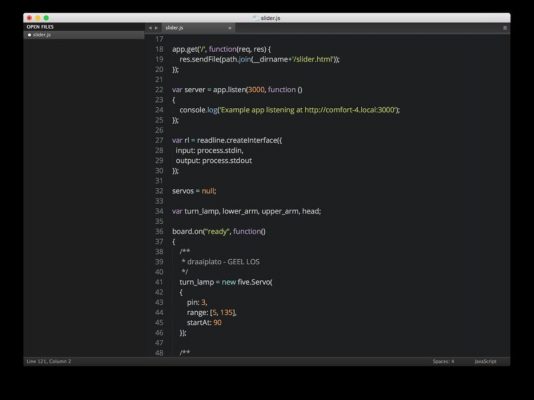
– Nếu các chân của bạn được kết nối với các cổng giống như tôi thì bạn đã hoàn thành. Nếu không thì đây là lúc để thay đổi chúng. Bạn có thể thực hiện việc này bằng lệnh: `vi Slider.js`
– Khi bạn đã sẵn sàng .. hãy chạy chương trình:` node Slider.js`
Intel edison sẽ tạo một máy chủ trên http://your-ip:3000 điều hướng đến URL và sử dụng các thanh trượt để điều khiển đèn Pixi của riêng bạn.