
Vi điều khiển
Hướng dẫn làm robot khối cầu tự lăn
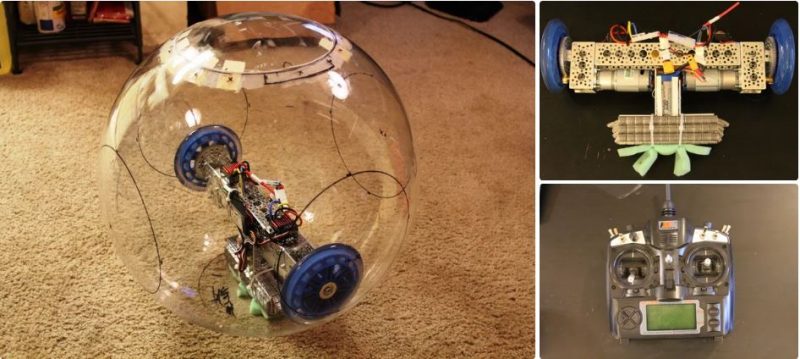
Đây là một thiết kế robot hình cầu mà tôi đang làm. Tôi dự định sử dụng nó để tạo một bản sao của BB-8 (còn nhiều việc phải làm!). Nó có đường kính khoảng 18 “và rất trực quan để điều khiển. Tôi đã chi khoảng 400 đô la cho mọi thứ trong hướng dẫn này. Cấu trúc bên trong và hệ thống truyền động được làm từ các bộ phận Actobotics chủ yếu có sẵn trong Servo.
Bước 1: Lắp ráp hệ thống ổ đĩa
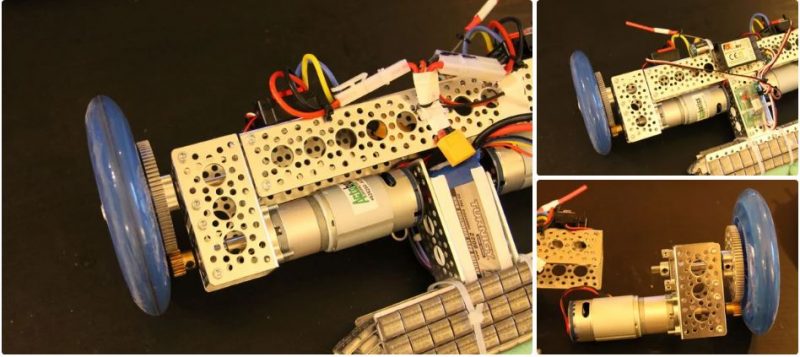
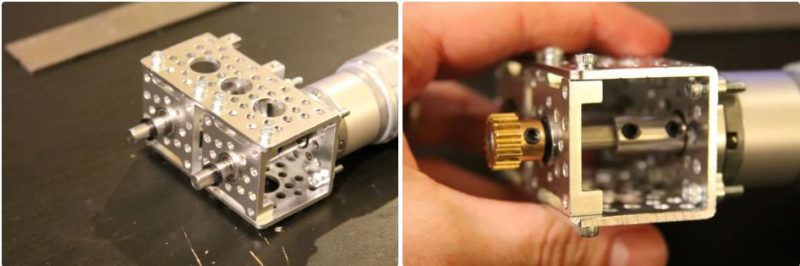
Một vài bước tiếp theo sẽ mô tả cách lắp ráp hệ thống ổ đĩa. Hệ thống ổ đĩa sử dụng các bộ phận Actobotics (được liệt kê sau). Tỷ lệ động cơ và thiết bị này mang lại sự cân bằng tốt và tốc độ trong robot ổn định.
Bước 2: Chuẩn bị Động cơ và Kết nối.
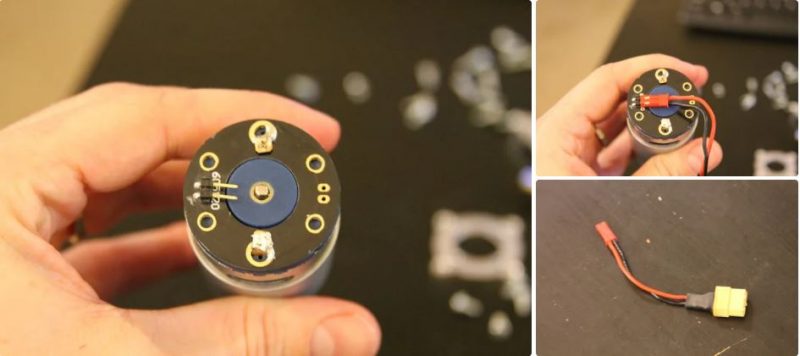
Trước khi lắp động cơ, tôi đã hàn mặt sau động cơ cho phép tôi dễ dàng kết nối đầu nối 20 JST. Tôi thấy điều này hữu ích cho việc sử dụng động cơ trong các dự án khác sau này và giúp việc sửa và bảo trì robot dễ dàng hơn nhiều. Tôi sẽ kết nối động cơ của mình với ESC (điều khiển tốc độ điện tử) sau bằng cách sử dụng đầu nối XT60 (nhiều đầu nối khác sẽ hoạt động tốt), vì vậy tôi đã nối đầu nối JST với đầu nối XT60.
Các động cơ Actobotics có một chấm trắng trên cực dương nhưng chúng cũng có thể được nối dây theo cách ngược lại.
Bạn có thể hàn dây trực tiếp vào động cơ và ESC, nhưng các đầu nối thực sự giúp mọi thứ dễ dàng hơn cho tương lai.
2x – (JST20M) Đầu nối 20 JST awg
2x – (605120) Bảng điều khiển bánh răng D (đối với bánh răng 32mm)
2x – Đầu nối XT60
Bước 3: Lắp ráp hệ thống ổ đĩa (2X)
Các bước sau đây sẽ mô tả cách tạo một trong các cụm bánh xe. Bạn phải thực hiện 2 trong số các cụm bánh xe. Mỗi cái đều giống hệt nhau.
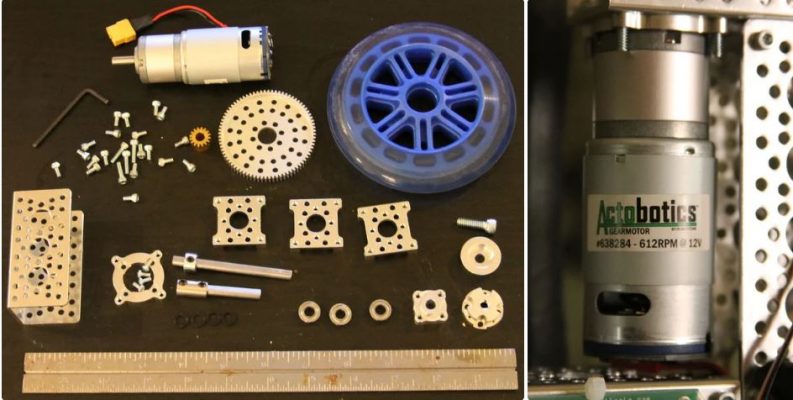
Bộ phận lắp ráp bánh xe MỘT
(638284) Động cơ bánh răng chính xác 612 RPM
3x – (535198) .250 inch ID x .500 inch Vòng bi mặt bích OD (Thép không gỉ) (Chúng có 2 gói, bạn cần 3 cho mỗi cụm bánh xe, tổng cộng 6 chiếc)
Ít nhất 64x – (632106) .250 in L x 6-32 Ốc vít bằng thép hợp kim mạ kẽm
(585442) Thanh nhôm 3.00 inch
3x – (545360) Quad Hub Mount C 90 độ
(633104) Miếng đệm trục và ống 1/4 inch (12 pk)
(634064) Trục D 1/4 inch x 1,50 inch
(595630) Bộ truyền động bánh xe A
(615242) 16 Răng, Bánh răng 32 inch, Bánh răng khoan 1/4 inch
(615206) Bánh răng nhôm 80T, 32P, 1/2 inch
(545548) Hub trục vít 1/4 inch (0,770 inch)
(6432K12) Collar 1/4 inch
(634078) Trục D 1/4 inch x 3.00 inch
(595624) Bánh xe Robot 4,90 inch (Màu xanh)
(625106) Bộ nối trục vít 1/4 inch đến 6 mm
Bước 4: Gắn bánh răng
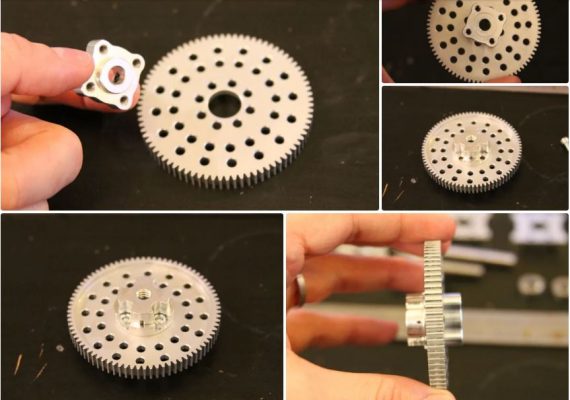
Đặt lỗ khoan, trục vít vào bánh răng bằng nhôm (mặt bích bánh răng xuống). Vặn bộ chuyển đổi bánh xe vào bánh răng và trục như trong hình bằng cách sử dụng 4 ốc vít mạ kẽm.
Bước 5: Kiểm tra hướng bánh xe

Các bánh xe không đối xứng nhưng có thể được gắn 2 cách. Một bên có những đường vân và độ côn nông hơn. Tôi đặt bánh xe của mình lên với những đường vân hướng ra ngoài.
Bước 6: Gắn bánh xe

Đặt bánh răng được gắn vào bánh xe, sau đó phần khác của bộ chuyển đổi bánh xe vào bánh xe, sau đó vặn chặt mọi thứ lại với nhau.
Bước 7: Gắn Motor Mount vào Motor
Gắn động cơ B vào động cơ. Hãy chắc chắn giá treo được định hướng sao cho các ốc vít chìm vào giá đỡ khi được siết chặt.
Bước 8: Gắn ổ trục
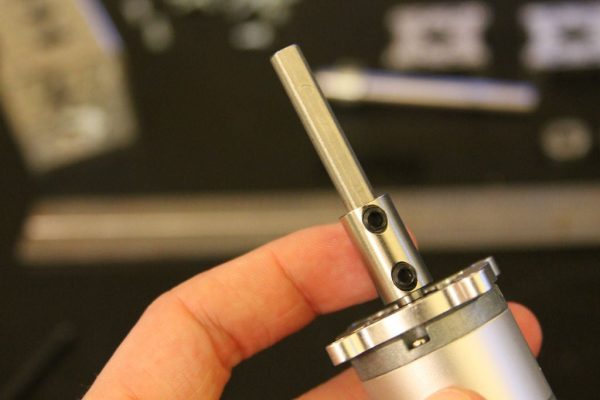
Gắn trục D dài 1,5 “vào động cơ bằng khớp nối. Hãy chắc chắn rằng khớp nối nối xuống động cơ càng chặc cảng tốt và trục D được đẩy càng xa càng tốt (điều này sẽ dẫn đến độ dài chính xác sau này) Rõ ràng là chắc chắn để siết chặt các khớp nối sao cho vít lục giác vít vào mặt phẳng của trục D. Hãy chắc chắn rằng các vít lục giác được siết chặt, mỏ của tôi bị lỏng.
Bước 9: Gắn mô tơ
Vặn mô-tơ vào một thanh nhôm 3 “như trong hình. Tôi đã sử dụng các ốc vít dài hơn (1/2”) nhưng điều này là không cần thiết.
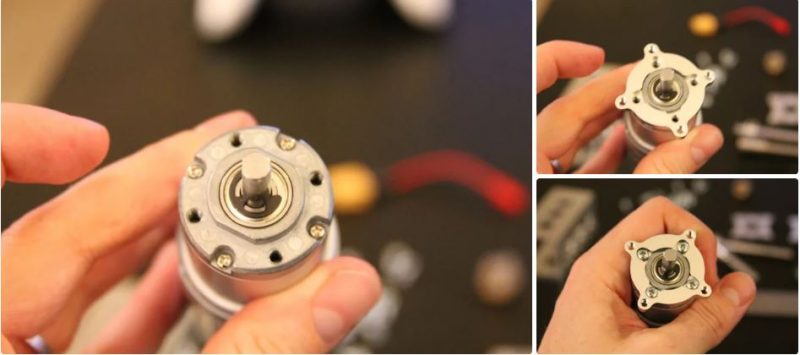
Bước 10: Gắn vòng bi và khớp
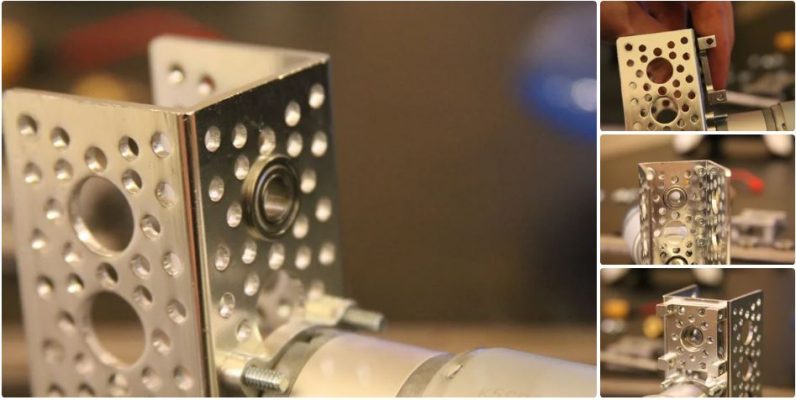
Đặt vòng bi vào lỗ trên của cụm động cơ với mặt bích ở bên ngoài kênh. Đặt khớp vào ổ trục như trong hình và vặn vào kênh bằng 4 ốc vít. Điều này kẹp các ổ trục giữa kênh và khớp giữ nó tại chỗ.
Khi gắn khớp, trước tiên hãy vặn từng ốc vít một cách lỏng lẻo, sau đó siết chặt từng cái thật chậm và đều để khớp được tuôn ra với kênh.
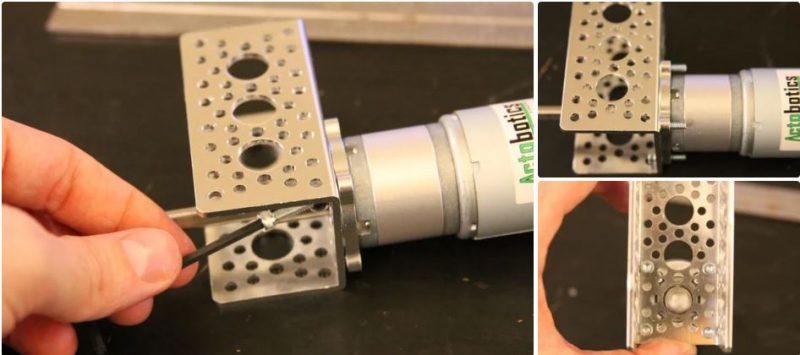
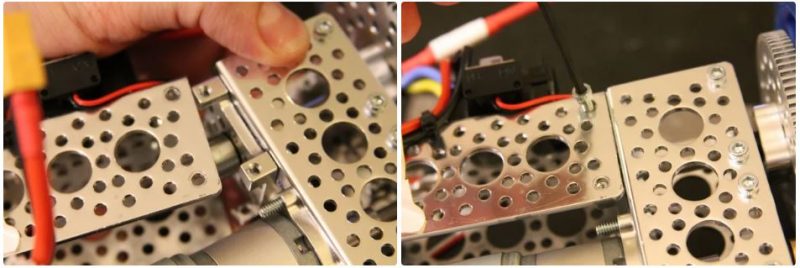
Bước 11: Nối 2 khớp
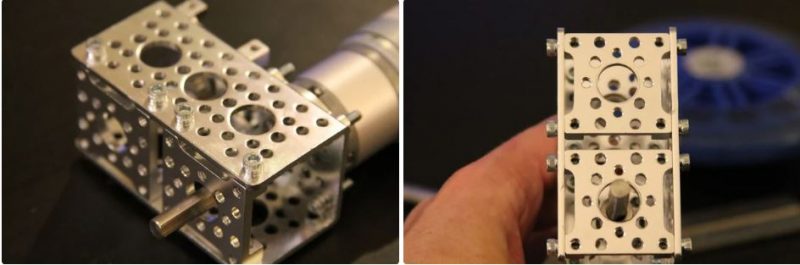
Vít trong hai trục gắn kết quad với 8 ốc vít như trong hình. Khi gắn các khớp này, vặn từng vít lỏng trước, sau đó siết chặt từng cái từ từ và đều. Cách dễ dàng hơn nhiều để đặt các ốc vít theo cách này.
Bước 12: Đặt vòng bi vào khớp
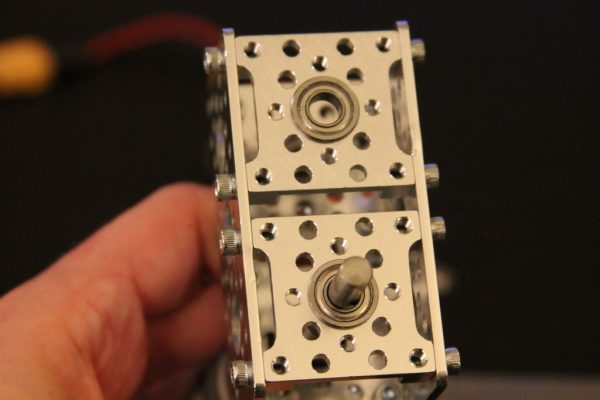
Trượt 2 vòng bi vào vị trí với mặt bích hướng ra ngoài.
Bước 13:
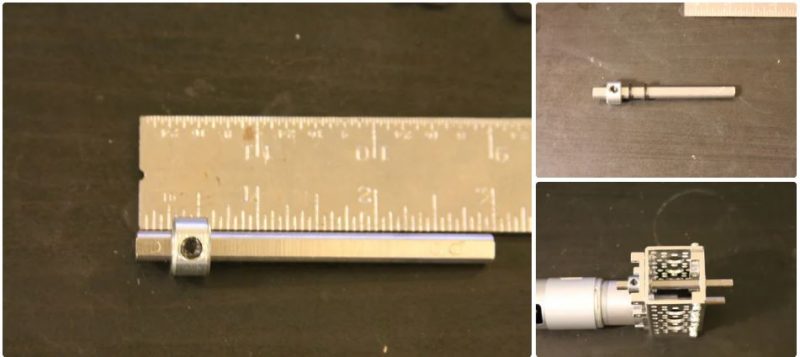
Gắn 1/4 thanh vào trục 3 “D để lại chính xác một phần tư inch nhô ra. Thêm 2 miếng đệm. Trượt trục qua các vòng bi gắn phía trên động cơ.
Bước 14: Bánh răng
Thêm một miếng đệm vào mỗi trục. Gắn bánh răng. Đảm bảo mọi thứ được đẩy chặt vào trục nhưng không đủ chặt để tạo ma sát.
Bước 15: Gắn bánh xe
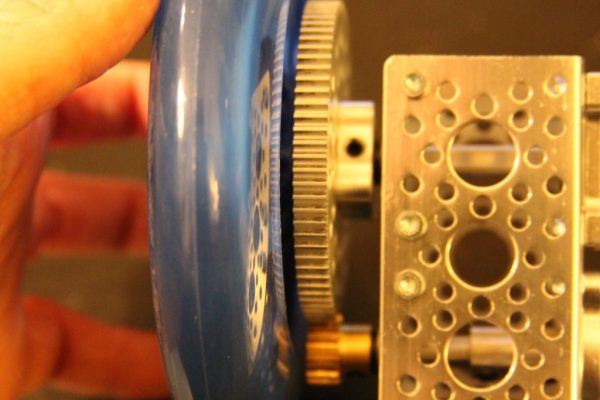
Đặt cụm bánh xe trên trục trên cùng. đảm bảo vít bộ ốc vít vào mặt phẳng của trục D
Bước 16: Gắn vào Thân chính
Gắn toàn bộ lắp ráp vào cuối một đoạn 9 “kênh
Bước 17: Thiết lập hệ thống điện
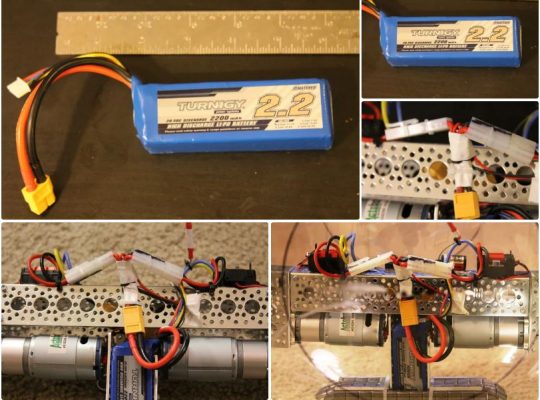
Tôi sử dụng Gói Lipo Turnigy 2200mAh 3S 20C với đầu nối XT60. Tôi đã hàn một chiếc XT60 với một số đầu nối RC tiêu chuẩn để được gắn vào ESC sau này. Có vẻ hơi cẩu thả nhưng nó hoạt động. Bạn có thể dễ dàng làm hỏng ESC hoặc pin của mình bằng cách tạo ra một mạch ngắn hoặc kết nối mọi thứ về phía sau.
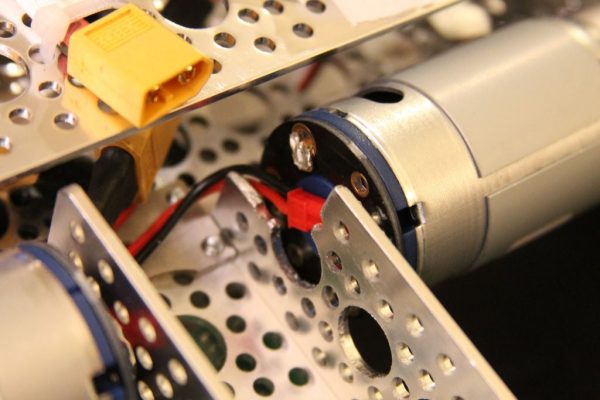
Bước 18: Nối ESC

Tôi đã sử dụng ESC QUICRUN 1060 Brushed (1/10) (cho mỗi động cơ). Dây màu đỏ và đen nối với nguồn và đất của pin. Màu vàng là dây dương động cơ, màu xanh là dây âm của động cơ. Các dây tín hiệu sẽ đi đến ổ đĩa máy tính. Chúng đi kèm với một chuyển đổi. Tôi tắt ESC cho đến khi mọi thứ được nối đúng cách. Jumppers nên được đặt thành LIPO và F / R. Các hướng dẫn đi kèm với ESC giải thích cách thực hiện việc này. Tôi dán ESC của mình vào robot bằng băng keo hai mặt (kèm theo ESC) ngay phía trên động cơ.
Tôi đã sử dụng cưa cđể cắt một lỗ nhỏ trên kênh để lắp các đầu nối XT60 của mình khi gắn các động cơ.,
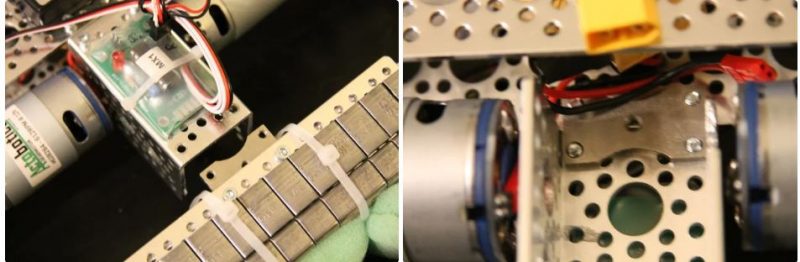
Bước 19: Reciever, mixer và tụ điện
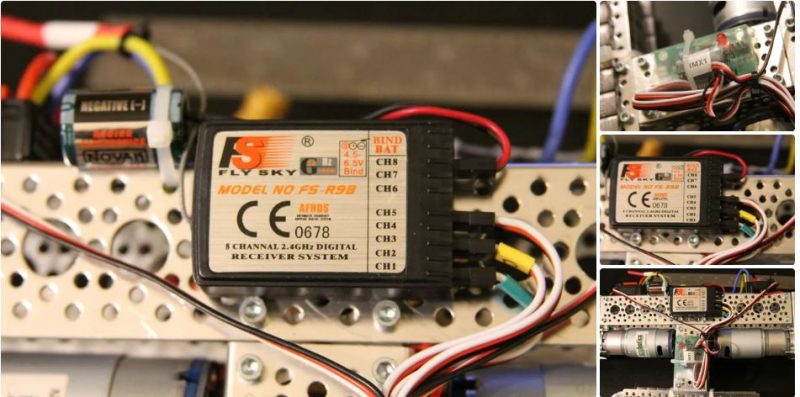
Máy thu của tôi là Máy thu Neewer® Fs-r9b 2.4g 8ch Rx-9x8c Dành cho Máy phát 9x Fs-th9b 9ch của Turnigy. Rõ ràng có được một máy thu tương thích với máy phát của bạn. Để làm cho tất cả các điều khiển siêu dễ dàng, tôi sử dụng máy tính điều khiển máy RC đảo ngược IMX-1. Hãy chắc chắn để thực hiện hiệu chuẩn được đề nghị. Tôi đặt đầu vào ổ đĩa trong kênh 3, đầu vào điều khiển trong kênh 1 và đảo ngược trong kênh 5 (điều này có ích nhưng không bắt buộc). Thiết lập này cho phép điều khiển trực quan toàn bộ robot trên thanh bên phải của máy phát. Các kênh có thể khác nhau giữa các hệ thống RC.
Cắm dây tín hiệu ESC vào phía trước bộ IMX-1. Các dây màu trắng (tín hiệu) phải đối diện với bên trong board.
Cũng trong hình là một tụ điện Glitch Buster Novak 5626. Điều này có thể cắm vào bất kỳ kênh nào và ngăn ngừa sự cố vô tuyến do động cơ amp cao ở gần máy thu. Tôi đã có một vài trục trặc ở đây và ở đó. Tụ điện này làm cho mọi thứ trơn tru hơn.
Bước 20: Phần trung tâm
Trung tâm của robot là một thanh nhôm 3 “được gắn với (A 545532) Tấm kết nối kênh A và bốn ốc vít. Tôi cắt một góc nhỏ của kênh ra bằng một cái cưa để nhường chỗ cho dây ra khỏi pin.
Bước 21: Nối Ballast
Phần dưới cùng của kênh 6 “cũng được nối với (545532) Tấm nối kênh A và bốn ốc vít.
Bước 22: Chấn lưu
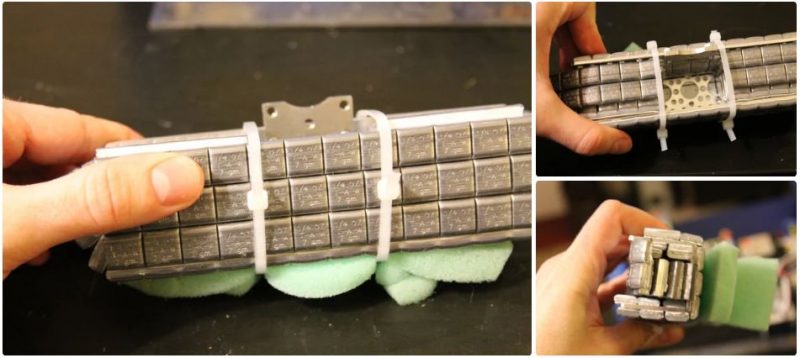
Tôi đã tạo ra chấn lưu của mình bằng cách sử dụng trọng lượng bánh xe chì để cân bằng bánh xe ô tô. Chúng được cố định bằng băng keo hai mặt đã có trên chúng. Tôi đã sử dụng khoảng 1,5-2 lbs trọng lượng để lấp đầy một đoạn thanh nhôm 6 “. Hãy chắc chắn chừa khoảng trống ở giữa để để pin. Hãy chắc chắn không thêm quá nhiều trọng lượng vào hai bên hoặc gắn xốp vào đáy bằng dây buộc. Đây là tùy chọn nhưng giúp loại bỏ sự chao đảo khỏi robot.
Bước 23: Cẩn thận!

Tôi đã sử dụng 2x – 18 in. Quả cầu nhựa trong suốt – với 8 in. Mở cổ – American 3202-18020-017. Đây là những thứ dễ vỡ. Tôi đã sử dụng một máy khoan và cắt bánh xe thành công để cắt mỏ của tôi nhưng vẫn tan chảy một chút nhựa. Những thứ này sẽ vỡ tan vì vậy hãy cẩn thận.
Bước 24: Chuẩn bị hình cầu, cắt vòng tròn, thẻ keo

Bạn sẽ cần 2x – 18 in. Quả cầu nhựa trong suốt – với 8 in. Mở cổ – American 3202-18020-017. Tạo một hình cầu như một khuôn để cắt một vòng tròn ra khỏi hình cầu khác (8 “). Tôi đã sử dụng một công cụ chà nhám để ghi điểm bên trong lỗ mở để epoxy sẽ bám tốt hơn. Cắt 8 hình chữ nhật ra khỏi 1/16 “Gỗ balsa dày (có thể sử dụng dao cắt). Các hình chữ nhật có kích thước 1 “x 1-3 / 4” mỗi hình. Sử dụng epoxy 5’, dán các hình chữ nhật vào bên trong quả cầu như hình. vị trí của các “tab” gỗ cho phép robot trượt vào và ra khỏi quả cầu. Tôi vát các cạnh của các tab để sau này các bánh xe có thể làm hỏng chúng dễ dàng hơn.
Bước 25: Bạn đã hoàn tất!

Robot đã hoàn tất. Xem video của tôi để xem demo. Hãy cẩn thận mang nó vào và ra khỏi quả cầu để bạn không làm vỡ các tab gỗ. Tôi đóng “cánh cửa” của quả cầu bằng băng keo vào lúc này nhưng tôi đang làm việc với một cơ chế chốt.