
Vi điều khiển
Hướng dẫn làm xe robot điều khiển bằng giọng nói
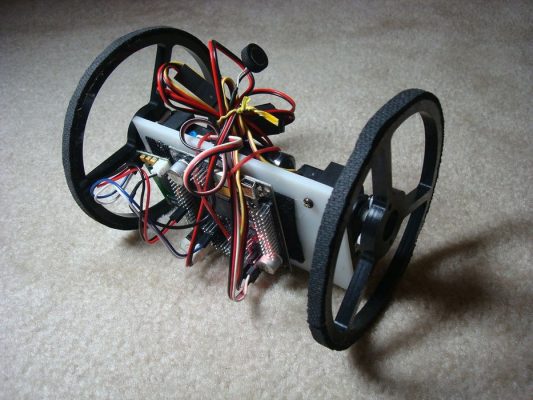
Hướng dẫn này sẽ chỉ ra cách xây dựng một robot điều khiển bằng giọng nói đơn giản, đủ dễ dàng cho người mới bắt đầu thực hiện chỉ trong vài giờ.
Chi phí của toàn bộ dự án là khoảng ~ $ 224, với các bộ phận và linh kiện chất lượng.
Sẽ có ba phần của hướng dẫn này. Phần này sẽ chỉ cho bạn cách lắp ráp robot một cách cơ học, phần tiếp theo sẽ chỉ cho bạn cách lập trình vi điều khiển của bạn và phần cuối cùng sẽ là cách định cấu hình nhận dạng giọng nói.
Xem video để được hướng dẫn từng bước và xem kết quả ở cuối.
Bước 1: Các bộ phận cần thiết
Bạn có thể tìm thấy tất cả các bộ phận bạn cần cho robot của mình bằng cách sử dụng danh sách các bộ phận robot tiện dụng này.
(2) servo – Tôi đã sử dụng HS-311 với giá ~ 8,99 đô la mỗi cái
(2) trục servo $ 1,95
(2) bánh xe- Tôi đã tùy chỉnh chúng bằng cách sử dụng CNC (mặc dù máy cắt laser sẽ tốt hơn), nhưng bạn có thể mua một số với giá ~ 3 đô la mỗi
(1) pin NiMH 6V – khoảng ~ $ 22 cho pin chất lượng
(1) miếng nhựa nhỏ
(16) 4-40 ốc vít ~ $ 2
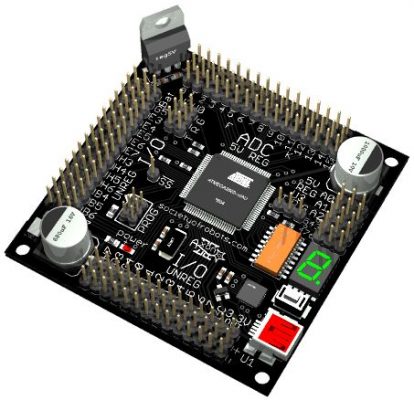
(1) Bộ vi điều khiển Axon II $ 118
(1) Mô-đun nhận dạng giọng nói VRbot $ 57,95
Bước 2: Cài đặt phần mềm
Bây giờ robot của bạn đã được lắp ráp, bây giờ chúng tôi sẽ lập trình robot.
Nếu bạn chưa bao giờ sử dụng Axon trước đây, hướng dẫn bắt đầu sẽ giúp bạn nhanh chóng biết sử dụng:
http://societyofrobots.com/axon2/axon2_setup1.shtml
Mã nguồn được nhận xét đầy đủ cho dự án này có thể được tải xuống tại đây:
http://www.societyofrobots.com/doads/Axon2_Voice_Recognition_Software.zip
Bạn sẽ cần AVR Studio để tải tệp .hex lên Axon của bạn – không cần lập trình. Nhưng hãy thoải mái sửa đổi nó nếu bạn muốn làm nhiều hơn nữa.
Video hướng dẫn này sẽ chỉ cho bạn cách tùy chỉnh phần mềm của robot bằng Trình thiết kế dự án WebbotLib .
Robot trong video bạn thấy sử dụng code sau đây:
Nó bao gồm tệp WebbotLib Project Designer
Bước 3: Cấu hình VRbot

Bước cuối cùng là lập trình các lệnh thoại bằng VRbot. Cách dễ nhất để làm điều này là dùng một bộ chuyển đổi nối tiếp sang USB. Tôi đã sử dụng board Sparkfun FTDI . Đảm bảo bạn cấp nguồn cho VRbot của bạn bằng đầu ra USB 5V, không phải đầu ra 3.3V nếu không nó sẽ không hoạt động. Hướng dẫn VRbot có nhiều chi tiết cụ thể hơn nếu bạn gặp khó khăn.
Sau khi kết nối mô-đun VRbot với máy tính của bạn, hãy làm theo hướng dẫn bằng video của nhà sản xuất này về cách sử dụng phần mềm GUI của họ:
Danh sách cụ thể các lệnh lập trình vào VRbot như sau, mặc dù nhiều thứ đã không được sử dụng trong bản demo này:
Nhóm 1:
PASA_THAI
LEFT
RIGHT
FORWARD
DANCE
WAI
BOW
ARM
ATTACK
SHUTDOWN
POWER_UP
LED
UP
DOWN
GRAB
RELEASE
Nhóm 2:
PASA_ANGRIT
LONG
KEUN
LEO_SAI
LEO_KWA
DTRONG_BAI
Bước 4: Nâng cấp Robot của bạn

Bây giờ bạn đã hoàn thành những điều cơ bản, hãy bắt đầu thêm nhiều servo và các lệnh khác để từ từ xây dựng robot của bạn.
Điều này tất nhiên nằm ngoài phạm vi của hướng dẫn, vì vậy tôi sẽ không đi sâu vào chi tiết, tuy nhiên tôi muốn chỉ ra những khả năng nào có thể.
Video này cho thấy các lệnh nâng cao hơn cho robot của bạn. Nếu bạn muốn nhận thiết kế và code cho robot này, cũng như tìm hiểu thêm, tôi đã ghi lại tất cả ở đây:
http://www.societyofrobots.com/robot_ERP.shtml
Bước 5: Giới thiệu về Vi điều khiển Axon II
(FYI – Tôi là người tạo ra Axon, vì vậy tôi thiên vị)
Tại sao sử dụng Axon II thay vì Arduino?
Axon chỉ cần một pin 6V để chạy mọi thứ, trong khi Arduino yêu cầu hai pin – 6V cho động cơ servo và pin 7.2V cho vi điều khiển. Axon là plug-n-play trong khi Arduino yêu cầu thêm các shield đắt tiền và các tấm protoboard. Đây là những chi phí ẩn của Arduino.
Axon cũng dễ như vậy nếu không dễ sử dụng hơn Arduino, với lập trình kéo thả đơn giản sử dụng WebbotLib Project Designer. Axon đắt hơn ~ 2 lần, nhưng có nhiều tính năng hơn ~ 3 lần.
Dưới đây là một vài video về cách dùng đơn giản: