
Tự làm DIY
Hướng dẫn ráp cánh tay robot mica Mearm
Trong bài này sẽ hướng dẫn bạn cách tự ráp và vận hành một cánh tay robot đơn giản nhất, rẻ nhất. Với chi phí tầm 600k, thời gian ráp nhanh navigate to this web-site. KHi ráp sẽ ráp phần khung và phần điện, cuối cùng là nối dây theo sơ đồ, dùng code và arduino để
điều khiển cánh tay robot hoạt động theo ý của bạn.
Bước 1: Chuẩn bị vật liệu
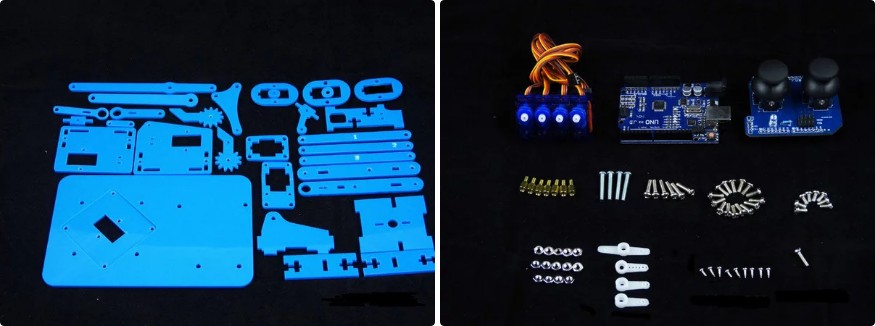
Một số bộ phận như: ốc vít,
(1) Bộ khung bằng mica
(2) Vít (Đường kính 3mm)
(1) Vít dài 20mm x 4
(2) 12mm x 6
(3) 10mm x 1
(4) 8mm x 16
(5) 6mm x 8
(6) Trụ đồng đực-đực x 7
(7) Đai ốc x 14
(3) Động cơ servo SG90 x 4
(4) Board mạch chủ Arduino x 1
(5) Board mở rộng joystick x 1
(6) Đệm cao su x 4
Bước 2: Lắp phần đế
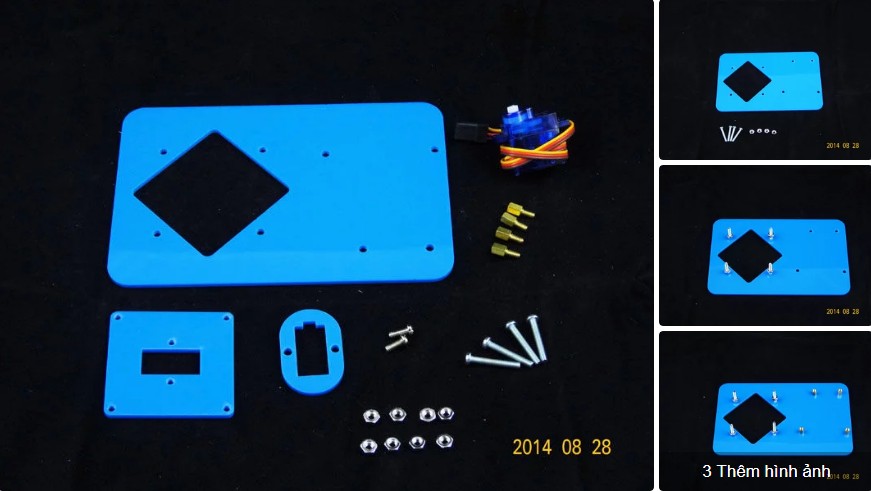
Vít được sử dụng:
(1) 20mm x 4
(2) Trụ đồng x 4
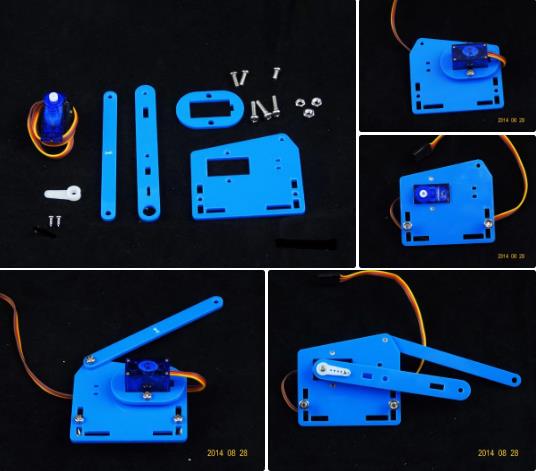
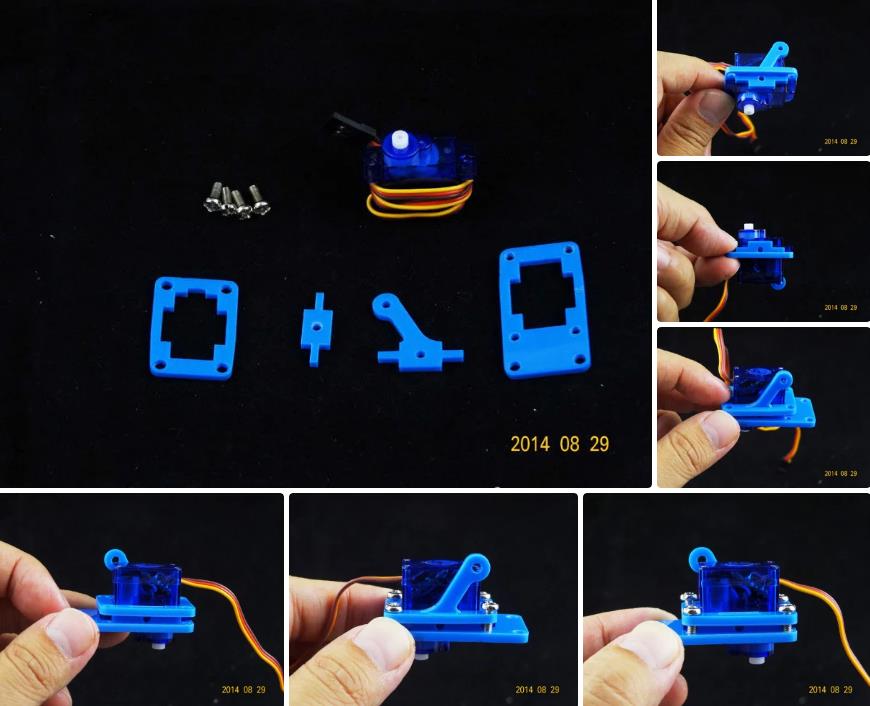
Bước 3: Lắp động cơ đầu tiên
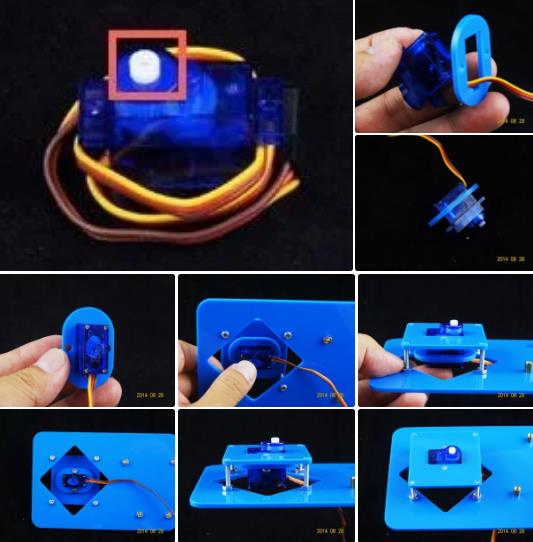
Vít được sử dụng:
(1) 8mm x 2
Bước 4: Lắp cánh tay trái
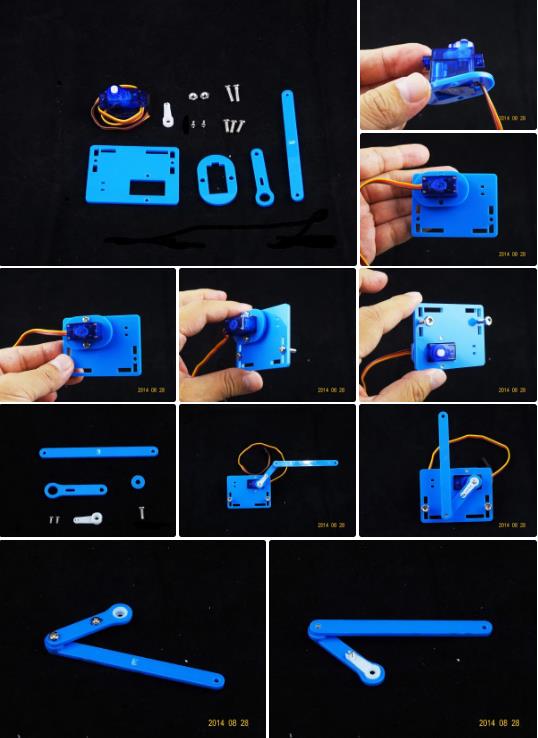
Trước tiên, hãy đặt một nắp nhỏ màu trắng trên động cơ, xoay nó theo chiều kim đồng hồ sao cho nó không thể xoay được, sau đó lắp lại nó vào như hình ảnh áp chót. nếu lỗ quá lỏng lẻo, nên sử dụng vít dài hơn để vặn .
Vít được sử dụng:
(1) 12mm x 2
(2) 8mm x 2
Bước 5: Lắp cánh tay phải
Trọng tâm của bước này cũng là điều chỉnh góc động cơ. Trước tiên hãy đặt một nắp nhỏ màu trắng trên động cơ, và “theo chiều kim đồng hồ” cho explanation đến khi nó không thể xoay, và sau đó cài đặt nó ở góc 3 giờ như trong hình cuối cùng.
Vít được sử dụng:
(1) 12mm x 2
(2) 8mm x 2
(3) 6mm x 1
Bước 6: Lắp cánh tay trái + Khung servo
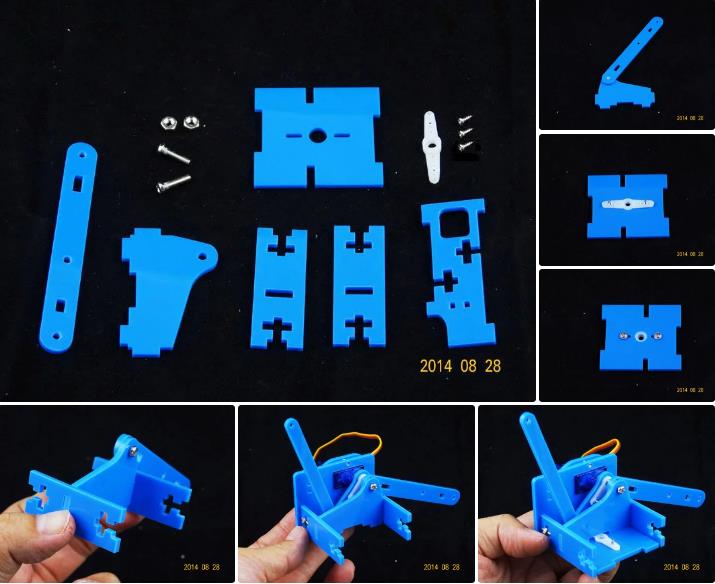
Vít được sử dụng:
(1) 12mm x 2
(2) 6mm x 1
Bước 7: Lắp cánh tay phải + Khung servo
Bước 8: Khung giữa
Vít được sử dụng:
(1) 12mm x 2
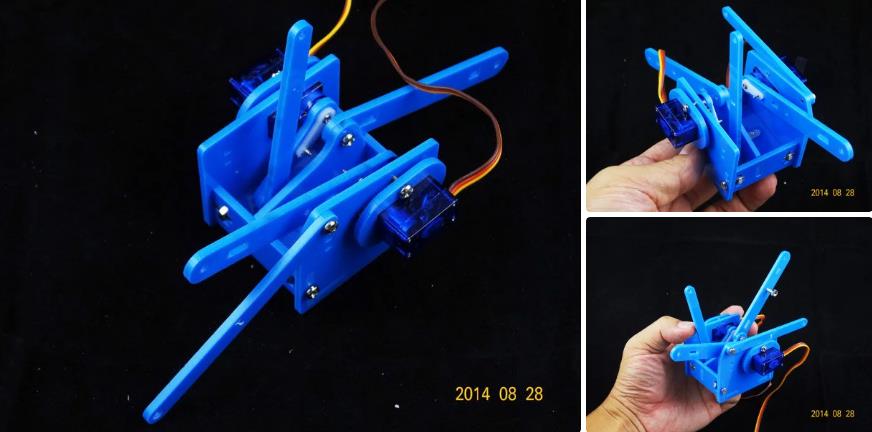
Bước 9: Lắp lên đế
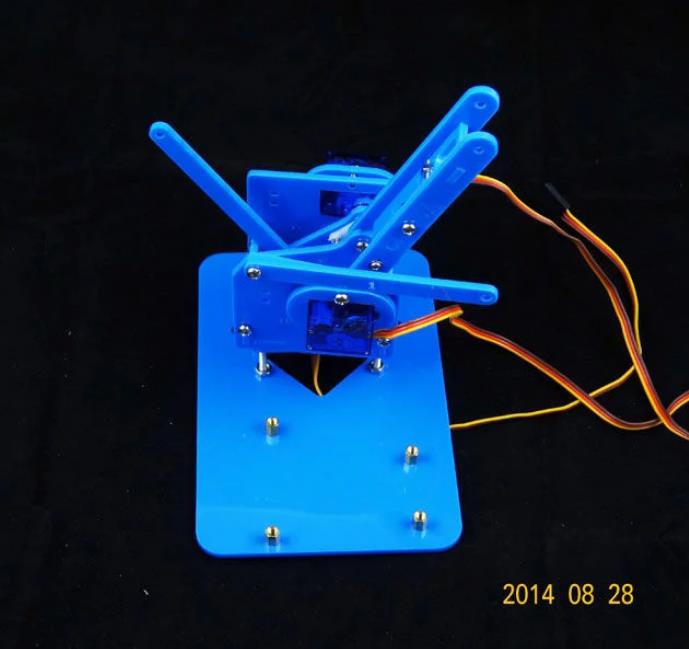
Bước 10: Gắn thanh dài
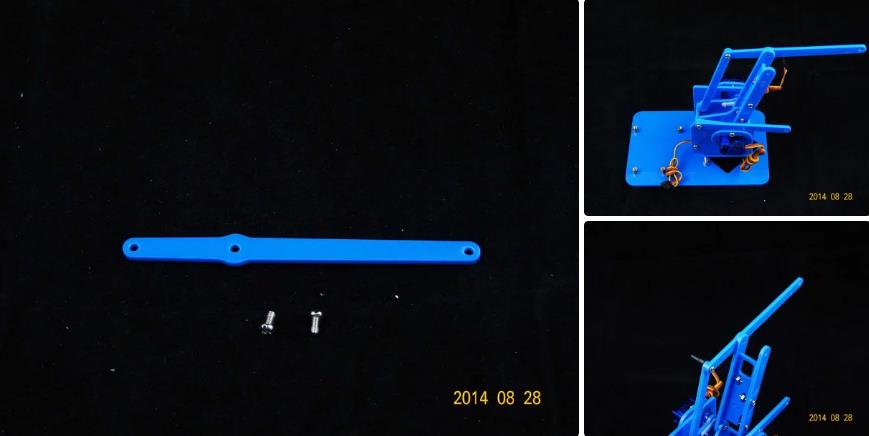
Vít được sử dụng:
(1) 6mm x 2
Bước 11: Lắp thanh khuỷu
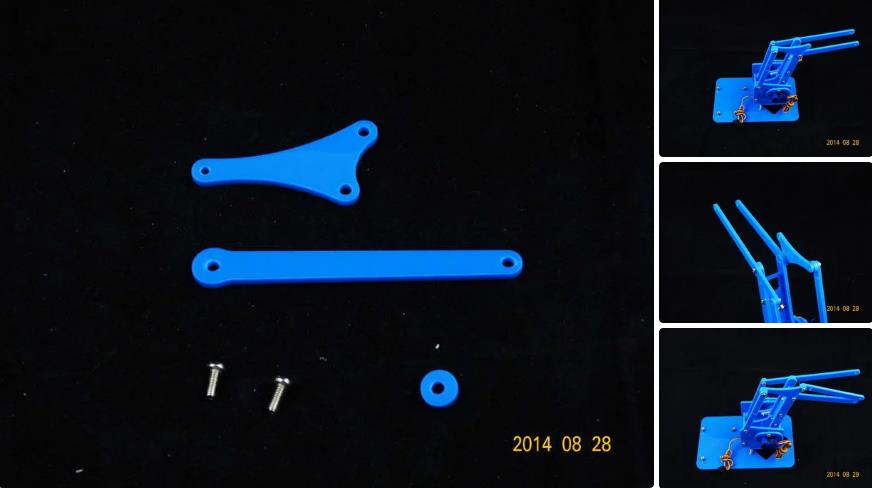
Vít được sử dụng:
(1) 8mm x 1
(2) 6mm x 1
Bước 12: Lắp động cơ cuối cùng
Vít được sử dụng:
(1) 8mm x 4
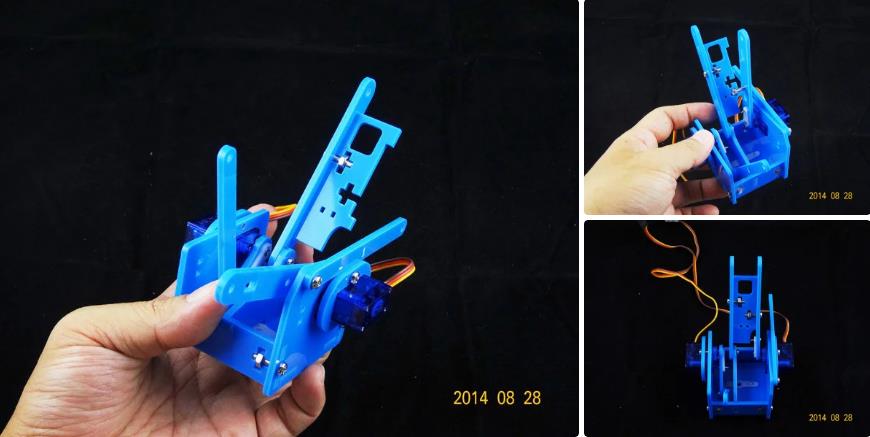
Bước 13: Lắp tay gắp
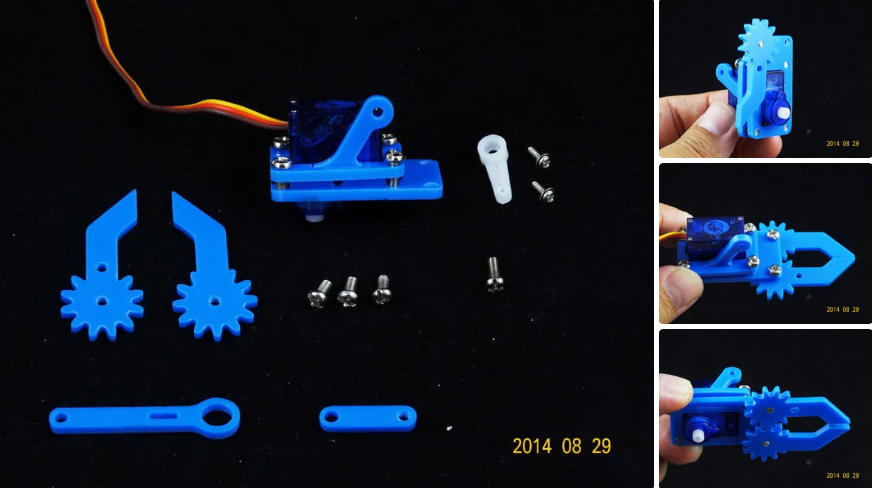
Vít được sử dụng:
(1) 8mm x 1
(2) 6mm x 3
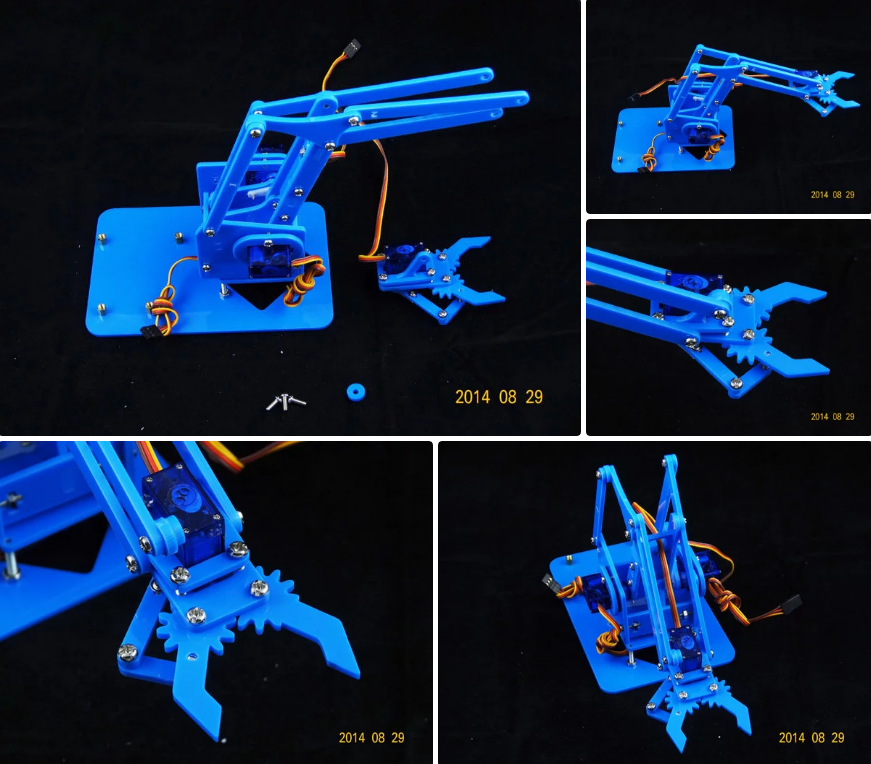
Bước 14: Lắp tay gắp lên khung
Bước 16: Lắp mạch điều khiển
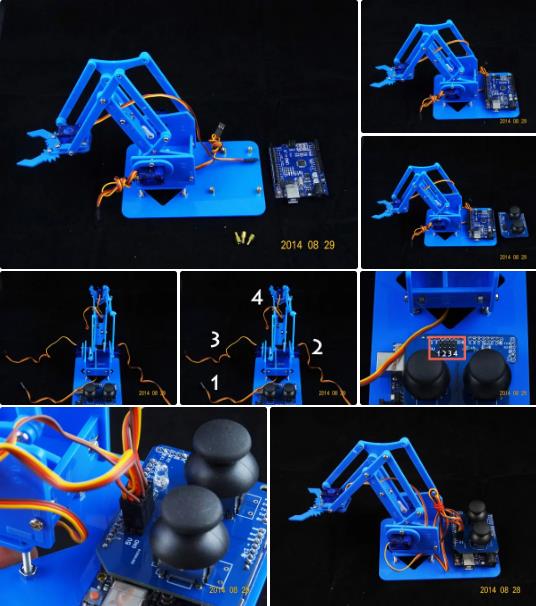
Hãy chú ý đến thứ tự và chú ý đến màu sắc của cáp, trong đó màu nâu phải hướng vào joystick và màu vàng hướng vào vào cánh tay.
Bước 17: Nạp chương trình và chạy thử
Cánh tay robot này thực hiện khá đơn giản,sản phẩm đucợ ứng dụng tốt cho nghiên cứu và dạy học, chúc các bạn thành công!