
Vi điều khiển
Tìm hiểu các linh kiện thường dùng cho xe robot
Tìm hiểu các linh kiện thường dùng cho xe robot

- Hộp số

Hình ảnh bộ phận: Hộp số
Về hộp số đôi:
Hộp số 70168 dễ lắp ráp và cho phép robot thực hiện lần lượt. Nó làm điều này bởi vì trục được cung cấp bởi một động cơ riêng biệt. Bộ này cũng có bốn bộ truyền động để lựa chọn, vì vậy nếu robot cần tốc độ nhanh hoặc mô-men quay, có thể thay đổi bánh răng.
2. Arduino Uno

Hình ảnh linh kiện: Arduino Uno
Robot cần một cái gì đó để báo cho các động cơ biết khi nào cần quay, tốc độ như thế nào và quay trong bao lâu. Robot cũng cần biết khi nào cần rẽ trái hay phải, dừng lại và làm thế nào để giải thích tín hiệu từ các cảm biến của nó. Nói tóm lại, robot cần một bộ não.
Bộ não của robot là Arduino Uno. Dựa trên các đầu vào từ các cảm biến, Arduino hoạt động dựa trên logic được viết bởi lập trình viên và tạo đầu ra.
3. Motor Shield

Hình ảnh bộ phận: Motor Shield
Arduino Shield là một linh kiện có thể được đặt trên Arduino và tất cả các chân của shield khớp với các chân của Arduino. Sự sắp xếp này làm cho nó rất dễ dàng để nối nhiều linh kiện mà không phải lo lắng về hệ thống dây điện. Đây là nơi mà board trong hình sẽ khác với board sẽ được dùng trong bài viết này. Board trong hình sử dụng một phiên bản khác của Seeedstudio Motor Shield, phiên bản 1.2 thay vì phiên bản 2.0. Phiên bản 2.0 là một cải tiến vì nó không sử dụng các đầu nối kiểu Grove độc quyền và giờ đây có thể sử dụng các bộ nối thay thế, rẻ hơn.
4. Cảm biến siêu âm

Hình ảnh linh kiện: Cảm biến siêu âm
Cảm biến khoảng cách siêu âm HC-SR04 là con mắt của robot. Với HC-SR04, robot có thể thu thập thông tin trong thế giới thực để cung cấp cho bộ não Arduino. Nói chính xác hơn, HC-SR04 sử dụng sonar giống như một con dơi, gửi sóng âm thanh và đo thời gian cần thiết để chúng quay trở lại. Bằng cách sử dụng tốc độ âm thanh, có thể tính khoảng cách giữa cảm biến và đối tượng được phát hiện.
5. Micro Servo

Hình ảnh bộ phận tìm nguồn cung ứng: Micro Servo
SG90 micro servo được sử dụng trên robot của chúng tôi giống như cổ người. Nó cho phép cảm biến siêu âm quay theo các hướng khác nhau, điều này tốt hơn nhiều so với việc chỉ ở một vị trí cố định trên robot.
Ngoài ra, có thể thiết lập một loạt nhiều cảm biến siêu âm, giống như mắt ruồi, với mỗi cảm biến đo khoảng cách từ một góc khác nhau.
6. Động cơ

Hình ảnh bộ phận: Động cơ
Bộ khung cơ bản đi kèm với động cơ 130, nhưng chúng là động cơ 3V ngốn quá nhiều dòng điện khi bị ngưng trệ. Thay thế chúng bằng động cơ Pololu # 1117 có điện áp cao hơn có nghĩa là dòng điện sẽ đi qua các trình điều khiển khi bị ngưng trệ. Điều này giữ cho các trình điều khiển động cơ không bị cháy.
7. Pin
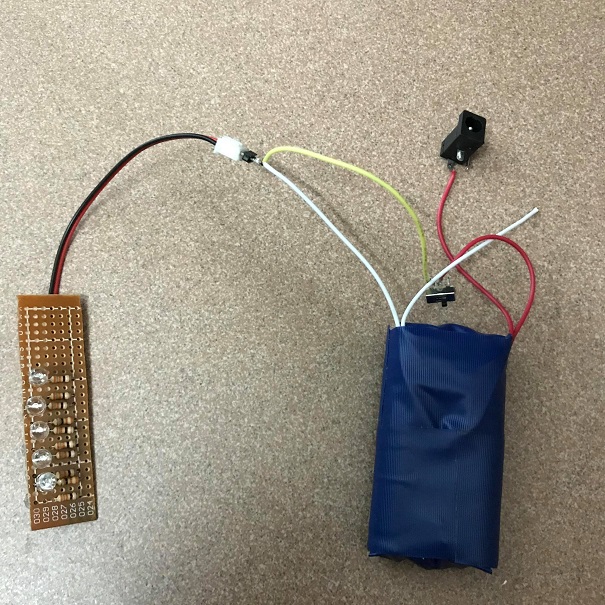
Hình ảnh bộ phận: Pin
Khi bạn thực hiện các sản phẩm robot và thiết bị cần tính cơ động như xe đồ chơi, robot đi được, xe dò line, và mọi loại thiết bị cần chế độ sạc thì có thể tham khảo bộ pin sạc dung lượng chuẩn ( mới 100%), Loại pin chuyên dùng cho các loại laptop 18650, pin có dung lượng lớn 2.200mah, điện thoại smartphone cũng dung lượng này nhưng công suất thấp hơn. Bạn có thể chọn loại 7.4V 2.200mah, hoặc 3.7v 4.400mah cùng mức giá ở trên.
Loại pin sạc đa năng giúp tăng tính linh động, có thể làm đèn ngủ mặt trăng, có thể làm đèn pin nếu bạn bán hàng ngoài chợ, những nơi tối mà không bắt điện được. Có thể dùng làm đèn đọc sách,..
Mạch pin sạc đa năng này đã được gắn sẵn chui sạc, có mạch sạc và mạch bảo vệ đi kèm và 2 pin 3.7V, 2.200mah. Có thể tích hợp đầu ra để sạc điện thoại, dùng đèn led, điều khiển robot nhện,.. nếu biết có thể kết hợp với mạch hạ áp hoặc tăng áp để dùng cho nguồn 1.5V tới 24V mà không phải tốn tiền mua thêm pin.